LV16-32-定时器-02-通用定时器-03-通用定时器PWM
本文主要是STM32开发——定时器 通用定时器 的 PWM输出 相关笔记,若笔记中有错误或者不合适的地方,欢迎批评指正😃。
点击查看使用工具及版本
| Windows | windows11 |
| Ubuntu | Ubuntu16.04的64位版本 |
| VMware® Workstation 16 Pro | 16.2.3 build-19376536 |
| SecureCRT | Version 8.7.2 (x64 build 2214) - 正式版-2020年5月14日 |
| 开发板 | 正点原子 i.MX6ULL Linux阿尔法开发板 |
| uboot | NXP官方提供的uboot,NXP提供的版本为uboot-imx-rel_imx_4.1.15_2.1.0_ga(使用的uboot版本为U-Boot 2016.03) |
| linux内核 | linux-4.15(NXP官方提供) |
| STM32开发板 | 正点原子战舰V3(STM32F103ZET6) |
点击查看本文参考资料
- 通用
| 分类 | 网址 | 说明 |
| 官方网站 | https://www.arm.com/ | ARM官方网站,在这里我们可以找到Cotex-Mx以及ARMVx的一些文档 |
| https://www.st.com/content/st_com/zh.html | ST官方网站,在这里我们可以找到STM32的相关文档 | |
| https://www.stmcu.com.cn/ | 意法半导体ST中文官方网站,在这里我们可以找到STM32的相关中文参考文档 | |
| http://elm-chan.org/fsw/ff/00index_e.html | FatFs文件系统官网 | |
| 教程书籍 | 《ARM Cortex-M3权威指南》 | ARM公司专家Joseph Yiu(姚文祥)的力作,中文翻译是NXP的宋岩 |
| 《ARM Cortex-M0权威指南》 | ||
| 《ARM Cortex-M3与Cortex-M4权威指南》 | ||
| 开发论坛 | http://47.111.11.73/forum.php | 开源电子网,正点原子的资料下载及问题讨论论坛 |
| https://www.firebbs.cn/forum.php | 国内Kinetis开发板-野火/秉火(刘火良)主持的论坛,现也做STM32和i.MX RT | |
| https://www.amobbs.com/index.php | 阿莫(莫进明)主持的论坛,号称国内最早最火的电子论坛,以交流Atmel AVR系列单片机起家,现已拓展到嵌入式全平台,其STM32系列帖子有70W+。 | |
| http://download.100ask.net/index.html | 韦东山嵌入式资料中心,有些STM32和linux的相关资料也可以来这里找。 | |
| 博客参考 | http://www.openedv.com/ | 开源网-原子哥个人博客 |
| http://blog.chinaaet.com/jihceng0622 | 博主是原Freescale现NXP的现场应用工程师 | |
| cortex-m-resources | 这其实并不算是一个博客,这是ARM公司专家Joseph Yiu收集整理的所有对开发者有用的官方Cortex-M资料链接(也包含极少数外部资源链接) |
点击查看相关文件下载
| 分类 | 网址 | 说明 |
| STM32相关 | STM32F103xx英文数据手册 | STM32F103xC/D/E系列的英文数据手册 |
| STM32F103xx中文数据手册 | STM32F103xC/D/E系列的中文数据手册 | |
| STM32F10xxx英文参考手册(RM0008) | STM32F10xxx系列的英文参考手册 | |
| STM32F10xxx中文参考手册(RM0008) | STM32F10xxx系列的中文参考手册 | |
| Arm Cortex-M3 处理器技术参考手册-英文版 | Cortex-M3技术参考手册-英文版 | |
| STM32F10xxx Cortex-M3编程手册-英文版(PM0056) | STM32F10xxx/20xxx/21xxx/L1xxxx系列Cortex-M3编程手册-英文版 | |
| STM32 HAL库开发实战 | 野火STM32开发教程在线文档——基于F103系列开发板 | |
| STM32库开发实战指南 | 野火STM32开发教程在线文档——基于野火霸道开发板 | |
| SD卡相关 | SD卡相关资料——最新版本 | 有关SD卡的一些资料可以从这里下载 |
| SD卡相关资料——历史版本 | 有关SD卡的一些历史版本资料可以从这里下载,比如后边看的SD卡2.0协议 | |
| SD 2.0 协议标准完整版 | 这是一篇关于SD卡2.0协议的中文文档,还是比较有参考价值的,可以一看 | |
| ESP32 | SD卡相关资料——最新版本 | 这个⼿册介绍了 ESP8266EX 的产品参数。 |
| ESP8266 系列入门教程 | 一个入门手册(安信可官网) | |
| ESP8266 AT 指令集 | 这是一篇关于ESSP8266的AT指令集的文档(安信可官网) | |
| ESP8266 AT 指令使用实例 | 这是一篇关于ESSP8266的AT指令集使用实例的文档(安信可官网) | |
| ESP-AT 用户指南 | 本指南详细介绍 ESP-AT 是什么、如何连接硬件、以及如何下载和烧录 AT 固件(乐鑫官网) | |
| 乐鑫官方技术文档 | 这里是乐鑫官方技术文档的入口,文档都可以来这里找(乐鑫官网) |
一、PWM产生原理
脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。我们可以让定时器产生PWM,在计数器频率固定时, PWM 频率或者周期由自动重载寄存器(TIMx_ARR)的值决定,其占空比由捕获/比较寄存器(TIMx_CCRx)的值决定。 PWM 产生原理示意图如下图所示:
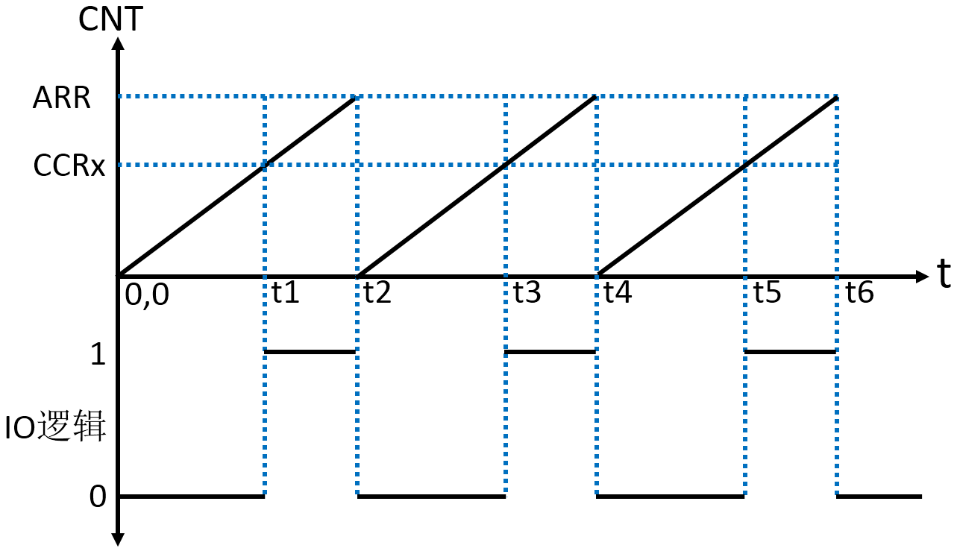
上图中,定时器工作在递增计数模式,纵轴是计数器的计数值 CNT,横轴表示时。当CNT<CCRx 时, IO 输出低电平(逻辑 0);当 CNT >=CCRx 时, IO 输出高电平(逻辑 1);当CNT=ARR 时,定时器溢出, CNT 的值被清零,然后继续递增,依次循环。在这个循环中,改变 CCRx 的值,就可以改变 PWM 的占空比,改变 ARR 的值,就可以改变 PWM 的频率,这就是 PWM 输出的原理。
定时器产生 PWM 的方式有许多种,下面我们以边沿对齐模式(即递增计数模式/递减计数模式)为例, PWM 模式 1 或者 PWM 模式 2 产生 PWM 的示意图, 如下图所示:
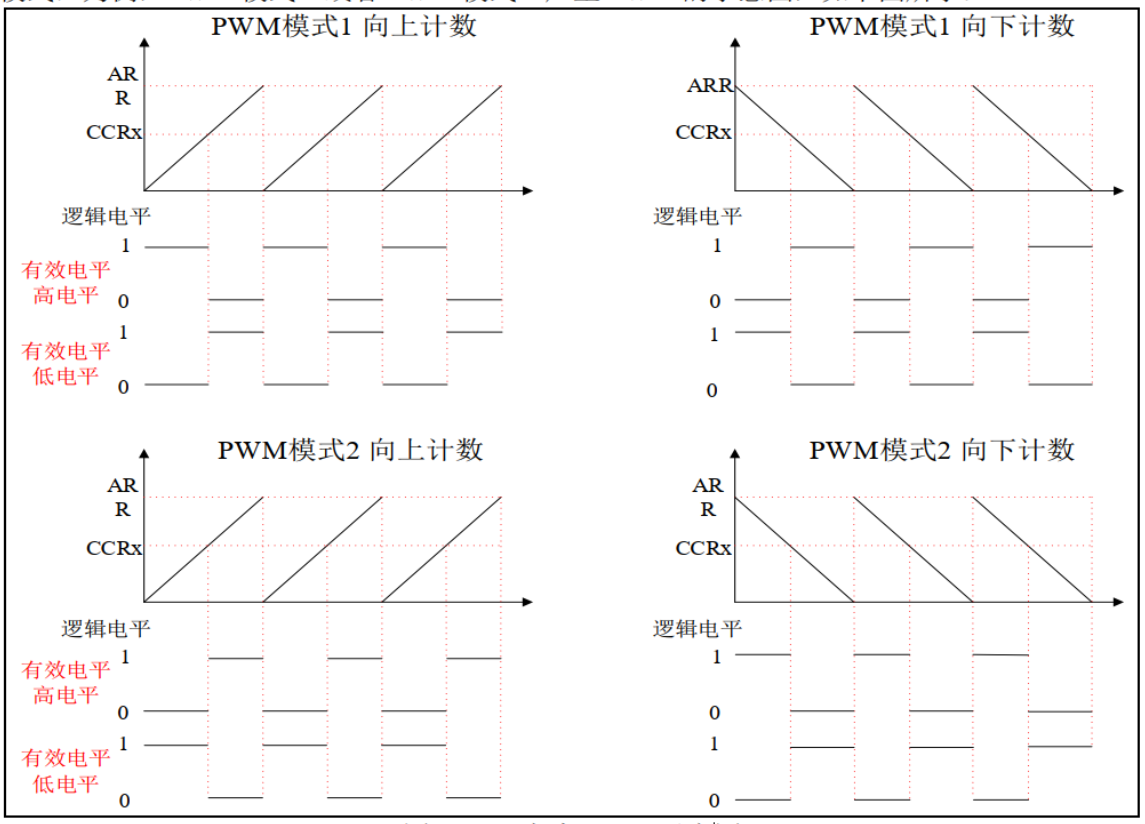
STM32F103 的定时器除了 TIM6 和 TIM7,其他的定时器都可以用来产生 PWM 输出。其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出。而通用定时器也能同时产生多达 4 路的 PWM 输出。
二、相关寄存器
要使 STM32F103 的通用定时器 TIMx 产生 PWM 输出,除了通用定时器中断小节笔记中学习的寄存器外,我们还会用到 3 个寄存器,来控制PWM。这三个寄存器分别是:捕获/比较模式寄存器(TIMx_CCMR1/2)、捕获/比较使能寄存器(TIMx_CCER)、捕获/比较寄存器(TIMx_CCR1~4)。接下来我们简单了解一下这三个寄存器。
1. 捕获/比较模式寄存器 1/2(TIMx_CCMR1/2)
TIM2/TIM3/TIM4/TIM5 的捕获/比较模式寄存器(TIMx_CCMR1/2),该寄存器一般有 2 个:TIMx _CCMR1 和 TIMx _CCMR2。 TIMx_CCMR1 控制 CH1 和 CH2,而 TIMx_CCMR2 控制CH3 和 CH4。 TIMx_CCMR1 寄存器描述如图
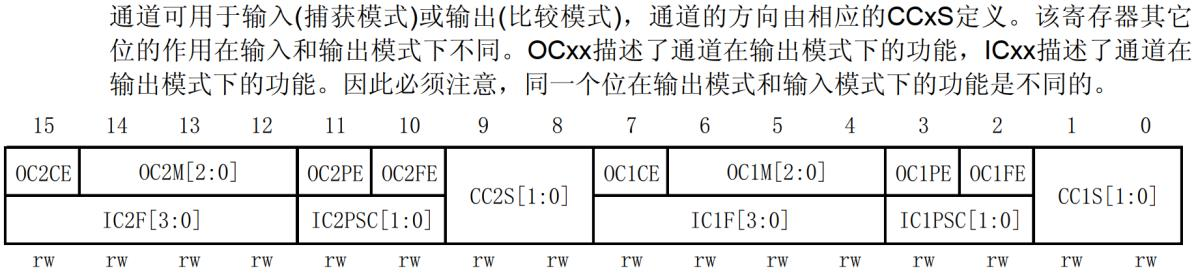
该寄存器的有些位在不同模式下,功能不一样,我们现在只用到输出比较,输入捕获后面会再学习。关于该寄存器的详细说明,可以参考《STM32F10xxx 参考手册_V10(中文版)》第 288 页, 14.4.7 节。
比如我们要让 TIM3 的 CH2 输出 PWM 波为例进行介绍,该寄存器的模式设置位 OC2M[2:0]就是对应着通道 2 的模式设置,此部分由 3 位组成。总共可以配置成 8 种模式,我们使用的是 PWM 模式,所以这 3 位必须设置为 110 或者 111,分别对应 PWM 模式 1和 PWM 模式 2。这两种PWM 模式的区别就是输出有效电平的极性相反。 位 OC2PE 控制输出比较通道 2 的预装载使能,实际就是控制 CCR2 寄存器是否进行缓冲。因为 CCR2 寄存器也是有影子寄存器的,影子寄存器才是真正起作用的寄存器。 CC2S[1:0]用于设置通道 2 的方向(输入/输出)默认设置为 0,就是设置通道作为输出使用。
2. 捕获/比较使能寄存器(TIMx_CCER)
TIM2/TIM3/TIM4/TIM5 的捕获/比较使能寄存器,该寄存器控制着各个输入输出通道的开关和极性。 TIMx_CCER 寄存器描述如图:

该寄存器比较简单,要让 TIM3 的 CH2 输出 PWM 波,这里我们要使能 CC2E 位,该位是通道 2 输入/输出使能位,要想 PWM 从 IO 口输出,这个位必须设置为 1。 CC2P 位是设置通道2 的输出极性,我们默认设置 0。
3. 捕获/比较寄存器 1/2/3/4(TIMx_CCR1/2/3/4)
捕获/比较寄存器(TIMx_CCR1/2/3/4),该寄存器总共有 4 个,对应 4 个通道 CH1~CH4。我们使用的是通道 2,所以来看看 TIMx_CCR2 寄存器, 描述如图
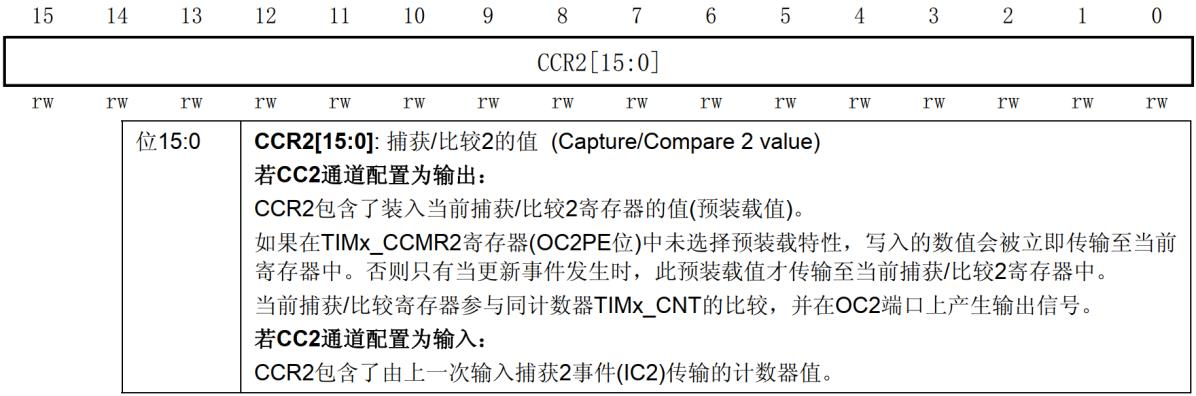
在输出模式下,捕获/比较寄存器影子寄存器的值与 CNT 的值比较,根据比较结果产生相应动作,利用这点,我们通过修改这个寄存器的值,就可以控制 PWM 的占空比了。