LV01-03-Cortex-A7架构-03-Cortex-A寄存器组
本文主要是Cortex-A7寄存器组的介绍的相关笔记,若笔记中有错误或者不合适的地方,欢迎批评指正😃。
点击查看使用工具及版本
| Windows版本 | windows11 |
| Ubuntu版本 | Ubuntu16.04的64位版本 |
| VMware® Workstation 16 Pro | 16.2.3 build-19376536 |
| 终端软件 | MobaXterm(Professional Edition v23.0 Build 5042 (license)) |
| Linux开发板 | 正点原子 i.MX6ULL Linux 阿尔法开发板 |
| uboot | NXP官方提供的uboot,NXP提供的版本为uboot-imx-rel_imx_4.1.15_2.1.0_ga(使用的uboot版本为U-Boot 2016.03) |
| linux内核 | linux-4.15(NXP官方提供) |
| Win32DiskImager | Win32DiskImager v1.0 |
点击查看本文参考资料
| 分类 | 网址 | 说明 |
| 官方网站 | https://www.arm.com/ | ARM官方网站,在这里我们可以找到Cotex-Mx以及ARMVx的一些文档 |
| https://www.nxp.com.cn/ | NXP官方网站 | |
| https://www.nxpic.org.cn/ | NXP 官方社区 | |
| https://u-boot.readthedocs.io/en/latest/ | u-boot官网 | |
| https://www.kernel.org/ | linux内核官网 |
点击查看相关文件下载
| 分类 | 网址 | 说明 |
| NXP | https://github.com/nxp-imx | NXP imx开发资源GitHub组织,里边会有u-boot和linux内核的仓库 |
| https://elixir.bootlin.com/linux/latest/source | 在线阅读linux kernel源码 | |
| nxp-imx/linux-imx/releases/tag/rel_imx_4.1.15_2.1.0_ga | NXP linux内核仓库tags中的rel_imx_4.1.15_2.1.0_ga | |
| nxp-imx/uboot-imx/releases/tag/rel_imx_4.1.15_2.1.0_ga | NXP u-boot仓库tags中的rel_imx_4.1.15_2.1.0_ga | |
| I.MX6ULL | i.MX 6ULL Applications Processors for Industrial Products | I.MX6ULL 芯片手册(datasheet,可以在线查看) |
| i.MX 6ULL Applications ProcessorReference Manual | I.MX6ULL 参考手册(下载后才能查看,需要登录NXP官网) | |
| ARM | Cortex-A7 MPCore Technical Reference Manual | Cortex-A7 MPCore技术参考手册 |
| ARM Architecture Reference Manual ARMv7-A and ARMv7-R edition | ARM架构参考手册ARMv7-A和ARMv7-R版 | |
| Arm Generic Interrupt Controller Architecture Specification- version 3 and version 4 | Arm通用中断控制器架构规范-版本3和版本4 | |
| ARM Generic Interrupt Controller Architecture Specification - Version 2.0 | Arm通用中断控制器架构规范-版本2.0 | |
| ARM Cortex-A Series Programmer's Guide for ARMv7-A | Cortex-A系列ARMv7-A编程指南 |
本节主要参考《ARM Cortex-A Series Programmer’s Guide for ARMv7-A》的“第 3 章 ARM Processor Modes And Registers”。
一、Cortex-A寄存器组
ARM 架构提供了 16 个 32 位的通用寄存器(R0R15)供软件使用,前 15 个(R0R14)可以用作通用的数据存储, R15 是程序计数器 PC,用来保存将要执行的指令。 ARM 还提供了一个当前程序状态寄存器 CPSR 和一个备份程序状态寄存器 SPSR, SPSR 寄存器就是 CPSR 寄存器的备份。
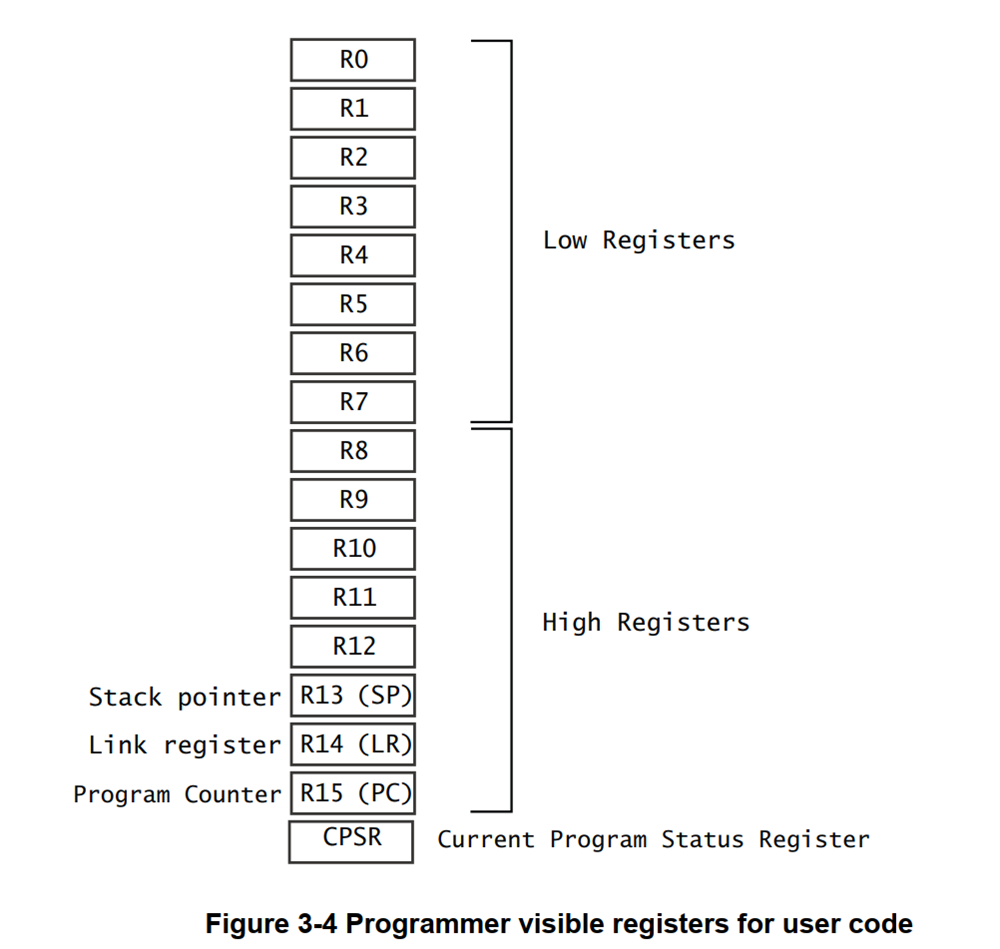
上一节的笔记已经了解到 Cortex-A7 有 9 种运行模式,每一种运行模式都有一组与之对应的寄存器组。每一种模式可见的寄存器包括 15 个通用寄存器(R0~R14)、一两个程序状态寄存器和一个程序计数器 PC。在这些寄存器中,有些是所有模式所共用的同一个物理寄存器,有一些是各模式自己所独立拥有的,各个模式所拥有的寄存器如下表:

浅色字体的是与 User 模式所共有的寄存器,蓝绿色背景的是各个模式所独有的寄存器。可以看出,在所有的模式中,低寄存器组(R0R7)是共享同一组物理寄存器的,只是一些高寄存器组在不同的模式有自己独有的寄存器,比如 FIQ 模式下 R8R14 是独立的物理寄存器。假如某个程序在 FIQ 模式下访问 R13 寄存器,那它实际访问的是寄存器 R13_fiq,如果程序处于 SVC 模式下访问 R13 寄存器,那它实际访问的是寄存器 R13_svc。
总结一下, CortexA 内核寄存器组成如下:
(1)34 个通用寄存器(未备份寄存器,即 R0~R7;备份寄存器,即 R8~R14;),包括 R15 程序计数器(PC)和程序状态寄存器,这些寄存器都是 32 位的。(2)8 个状态寄存器,包括 CPSR 和 SPSR。
(3)Hyp 模式下独有一个 ELR_Hyp 寄存器。
二、寄存器说明
1. 未备份寄存器
未备份寄存器指的是 R0~R7。因为在所有的运行模式下 R0~R7 寄存器都是同一个物理寄存器,在不同的模式下, R0~R7 寄存器中的数据就会被破坏,所以 R0~R7这8个寄存器并没有被用作特殊用途。
2. 备份寄存器
2.1 R8~R12
这 5 个寄存器有两种物理寄存器,在快速中断模式下(FIQ)它们对应着 Rx_irq (x=8~12)物理寄存器,其他模式下对应着 Rx (8~12) 物理寄存器。 FIQ 是快速中断模式,看名字就是知道这个中断模式要求快速执行。 FIQ 模式下中断处理程序可以使用 R8~R12寄存器,因为FIQ 模式下的 R8~R12 是独立的,因此中断处理程序可以不用执行保存和恢复中断现场的指令,从而加速中断的执行过程。
2.2 R13(SP,Stack Pointer)
备份寄存器 R13 一共有 8 个物理寄存器,其中一个是用户模式(User)和系统模式(Sys)共用的,剩下的 7 个分别对应 7 种不同的模式。 R13 也叫做 SP,用来做为栈指针。基本上每种模式都有一个自己的 R13 物理寄存器,应用程序会初始化 R13,使其指向该模式专用的栈地址,这就是常说的初始化 SP 指针。主要用于存储当前模式下的栈顶地址。
2.3 R14(LR,Link Register)
备份寄存器 R14 一共有 7 个物理寄存器,其中一个是用户模式(User)、系统模式(Sys)和超级监视模式(Hyp)所共有的,剩下的 6 个分别对应 6 种不同的模式。R14 也称为连接寄存器(LR),LR 寄存器在 ARM 中主要用作如下两种用途:
(1)每种处理器模式使用 R14(LR)来存放当前子程序的返回地址,如果使用 BL 或者 BLX来调用子函数的话, R14(LR)被设置成该子函数的返回地址,在子函数中,将 R14(LR)中的值赋给 R15(PC)即可完成子函数返回,比如在子程序中可以使用如下代码:
1 | MOV PC, LR @寄存器 LR 中的值赋值给 PC,实现跳转 |
或者可以在子函数的入口出将 LR 入栈 :
1 | PUSH {LR} @将 LR 寄存器压栈 |
在子函数的最后面出栈即可:
1 | POP {PC} @ 将上面压栈的 LR 寄存器数据出栈给 PC 寄存器,严格意义上来讲应该是将 |
总的来说就是执行跳转指令( BL/BLX )时, LR 会自动保存跳转指令下一条指令的地址,当程序需要返回时将 LR 的值复制到 PC 即可实现程序返回。
(2)当异常发生以后,该异常模式对应的 R14 寄存器被设置成该异常模式将要返回的地址,R14 也可以当作普通寄存器使用。
点击查看 LR 在 BL 和 IRQ 中断的不同
- BL
当执行 BL 指令时,指令执行过程中处理器内部就会将 PC 寄存器的值拷贝到 LR 寄存器,然后再将 LR 寄存器中的值自减 4 , 所以 LR 寄存器中保存的就是 BL 指令下一条指令的地址。
- IRQ中断
当正在执行一条指令时产生了一个 IRQ 中断,执行这条指令过程中处理器不会保存返回地址,而是执行完成后才会保存 PC 寄存器中的值到 LR 寄存器,但发生 IRQ 时正在执行的指令在执行完成后 PC 的值又会自动增 4 ,所以对于 IRQ 来说 LR 中保存的是被中断打断的指令的下下条指令的地址。所以我们在写中断处理的时候要注意修正这个问题,否则就会少一条指令。
当执行跳转指令或产生异常时, LR 寄存器中不会凭空产生一个返回地址,其原理是当执行跳转指令或产生异常时,处理器内部会将 PC 寄存器中的值拷贝到 LR 寄存器中,然后再将 LR 寄存器中的值自减 4 。
2.4 R15(PC,Program Counter)
程序计数器 R15 也叫做 PC,用于存储当前取址指令的地址。对于三级流水线的 ARM 处理器来说, R15 保存着当前执行的指令地址值加 8 个字节,这是因为 ARM 的流水线机制导致的。 ARM 处理器的 3 级流水线为:取指→译码→执行,这三级流水线循环执行,比如当前正在执行第一条指令的同时也对第二条指令进行译码,第三条指令也同时被取出存放在 R15(PC) 中。
我们以当前正在执行的指令作为参考点的话,也就是以第一条指令为参考点,此时 R15(PC))中存放的就是第三条指令,换句话说就是 R15(PC))总是指向当前正在执行的指令地址再加上 2 条指令的地址。对于 32 位的 ARM 处理器,每条指令是 4 个字节,所以有:
1 | R15 (PC)值 = 当前执行的程序位置 + 8 个字节 |
3. 程序状态寄存器 CPSR 和 SPSR
程序状态寄存器 PSR 可以分成当前程序状态寄存器 CPSR 与备份程序状态寄存器 SPSR。
所有的处理器模式都共用一个 CPSR 物理寄存器,因此 CPSR 可以在任何模式下被访问。 CPSR 是当前程序状态寄存器,该寄存器包含了条件标志位、中断禁止位、当前处理器模式标志等一些状态位以及一些控制位。
但是所有的处理器模式都共用一个 CPSR 必然会导致冲突,为此,除了 User 和 Sys 这两个模式以外,其他 7 个模式每个都配备了一个专用的物理状态寄存器,叫做 SPSR (备份程序状态寄存器),当特定的异常中断发生时,SPSR 寄存器用来保存当前程序状态寄存器(CPSR)的值,当异常退出以后可以用 SPSR 中保存的值来恢复 CPSR 。因为 User 和 Sys 这两个模式不是异常模式,所以并没有配备 SPSR ,因此不能在 User 和 Sys 模式下访问 SPSR ,会导致不可预知的结果。由于 SPSR 是 CPSR 的备份,因此 SPSR 和 CPSR 的寄存器结构相同。结构如下图所示:

- N(bit31) :当两个补码表示的有符号整数运算的时候, N=1 表示运算对的结果为负数, N=0 表示结果为正数。
- Z(bit30) : Z=1 表示运算结果为零, Z=0 表示运算结果不为零,对于 CMP 指令, Z=1 表示进行比较的两个数大小相等。
- C(bit29) :在加法指令中,当结果产生了进位,则 C=1 ,表示无符号数运算发生上溢,其它情况下 C=0 。在减法指令中,当运算中发生借位,则 C=0 ,表示无符号数运算发生下溢,其它情况下 C=1 。对于包含移位操作的非加减法运算指令, C 中包含最后一次溢出的位的数值,对于其它非加减运算指令, C 位的值通常不受影响。
- V(bit28) :对于加减法运算指令,当操作数和运算结果表示为二进制的补码表示的带符号数时, V=1 表示符号位溢出,通常其他位不影响 V 位。
- Q(bit27) :仅 ARM v5TE_J 架构支持,表示饱和状态, Q=1 表示累积饱和, Q=0 表示累积不饱和。
- IT[1:0](bit26:25) :和 IT[7:2](bit15:bit10) 一起组成 IT[7:0] ,作为 IF-THEN 指令执行状态。
- J(bit24) :控制指令执行状态,表明本指令是 ARM 指令还是Thumb 指令。仅 ARM_v5TE-J 架构支持, J=1 表示处于 Jazelle 状态,此位通常和 T(bit5) 位一起表示当前所使用的指令集。
| J(bit24) | T(bit5) | 指令类型 |
| 0 | 0 | ARM |
| 0 | 1 | Thumb |
| 1 | 1 | ThumbEE |
| 1 | 0 | Jazelle |
- GE[3:0](bit19) : SIMD 指令有效,大于或等于。
- IT[7:2](bit15) :参考 IT[1:0] 。
- E(bit9) :大小端控制位, E=1 表示大端模式, E=0 表示小端模式。
- A(bit8) : 禁止异步中断位, A=1 表示禁止异步中断。
- I(bit7) : I=1 禁止 IRQ , I=0 使能 IRQ 。
- F(bit6) : F=1 禁止 FIQ , F=0 使能 FIQ 。
- T(bit5) : 控制指令执行状态,表明本指令是 ARM 指令还是 Thumb 指令,通常和 J(bit24) 一起使用表明指令类型,参考 J(bit24) 位。
- M[4:0] 处理器模式控制位, 取值与模式对应情况如下:
| M[4:0] | 处理器模式 |
| 10000 | User模式 |
| 10001 | FIQ模式 |
| 10010 | IRQ模式 |
| 10011 | Supervisor(SVC)模式 |
| 10110 | Monitor(MON)模式 |
| 10111 | Abort(ABT)模式 |
| 11010 | Hyp(HYP)模式 |
| 11011 | Undef(UND)模式 |
| 11111 | System(SYS)模式 |