LV05-05-系统启动-01-系统启动过程
本文主要是系统启动——系统启动过程的相关笔记,若笔记中有错误或者不合适的地方,欢迎批评指正😃。
点击查看使用工具及版本
| PC端开发环境 | Windows | Windows11 |
| Ubuntu | Ubuntu20.04.2的64位版本 | |
| VMware® Workstation 17 Pro | 17.6.0 build-24238078 | |
| 终端软件 | MobaXterm(Professional Edition v23.0 Build 5042 (license)) | |
| Win32DiskImager | Win32DiskImager v1.0 | |
| Linux开发板环境 | Linux开发板 | 正点原子 i.MX6ULL Linux 阿尔法开发板 |
| uboot | NXP官方提供的uboot,使用的uboot版本为U-Boot 2019.04 | |
| linux内核 | linux-4.19.71(NXP官方提供) |
点击查看本文参考资料
| 分类 | 网址 | 说明 |
| 官方网站 | https://www.arm.com/ | ARM官方网站,在这里我们可以找到Cotex-Mx以及ARMVx的一些文档 |
| https://www.nxp.com.cn/ | NXP官方网站 | |
| https://www.nxpic.org.cn/ | NXP 官方社区 | |
| https://u-boot.readthedocs.io/en/latest/ | u-boot官网 | |
| https://www.kernel.org/ | linux内核官网 |
点击查看相关文件下载
| 分类 | 网址 | 说明 |
| NXP | https://github.com/nxp-imx | NXP imx开发资源GitHub组织,里边会有u-boot和linux内核的仓库 |
| nxp-imx/linux-imx/releases/tag/v4.19.71 | NXP linux内核仓库tags中的v4.19.71 | |
| nxp-imx/uboot-imx/releases/tag/rel_imx_4.19.35_1.1.0 | NXP u-boot仓库tags中的rel_imx_4.19.35_1.1.0 | |
| I.MX6ULL | i.MX 6ULL Applications Processors for Industrial Products | I.MX6ULL 芯片手册(datasheet,可以在线查看) |
| i.MX 6ULL Applications ProcessorReference Manual | I.MX6ULL 参考手册(下载后才能查看,需要登录NXP官网) | |
| Source Code | https://elixir.bootlin.com/linux/latest/source | linux kernel源码 |
| https://elixir.bootlin.com/u-boot/latest/source | uboot源码 |
一、uboot启动流程分析
1. PC机、Linux、Andorid启动过程
(1)PC机启动过程: BIOS和位于硬盘MBR中的LILO和GRUB等共同构成了PC的引导加载程序,通常BIOS完成检测系统硬件(如初始化DDR内存、 硬盘)以及分配资源等工作,随后把位于硬盘MBP里的BootLoader加载到RAM中,从此BIOS便会将控制权交由这段 BootLoader(LILO和GRUB等)接管,BootLoader主要负责将内核的OS镜像从硬盘加载到RAM当中运行,之后便跳转到 内核的入口地址去运行,OS在启动之后BIOS就没有什么作用了。
(2)嵌入式Linux启动过程: 在嵌入式Linux当中,uboot以及OS都部署在flash或eMMC当中,一般在嵌入式系统中很少有和PC机类似的BIOS程序,所以系统 的启动加载任务完全由BootLoader来负责,该BootLoader所做的工作和PC机的类似,都要初始化硬件(如DDR与flash或eMMC)、 建立内存空间映射图等,接着将OS从flash或eMMC中读取到DDR中,最后启动OS,OS在启动之后u-boot也有什么作用了。
(2)Andorid系统启动过程: 由于安卓系统是基于linux系统发展而来的,所以他们的启动过程基本一致,只是在内核启动以后加载根文件系统之后有差别。 Andorid系统启动可以概括为两个阶段,第一阶段是uboot到OS,第二阶段是OS启动之后到根文件系统加载再到命令的执行,andorid系统的启动与嵌入式Linux的主要差别为第二阶段的不同。
嵌入式Linux系统和PC机的启动过程几乎一样,只不过是uboot替代了BIOS,flash或eMMC替代了硬盘而已,嵌入式Linux系统与andorid 更加类似,只是andorid在加载根文件系统之后有差异,三者都是类似的。
2. u-boot启动流程简要分析
2.1 iROM
imx6ull的启动方式与大多数ARM芯片启动类似,还未启动linux启动前,可以将imx6ull理解为与STM32类似的单片机,因为没有开启mmu,它访问的所有 地址都是实际的物理地址,imx6ull启动是,首先会去0x0000_0000地址处开始取值并执行。那么问题来了,0x0000_0000地址到底在哪里?他在芯片内部iROM中。
我们可以看《i.MX 6ULL Applications Processor Reference Manual 》的8.4.1节:
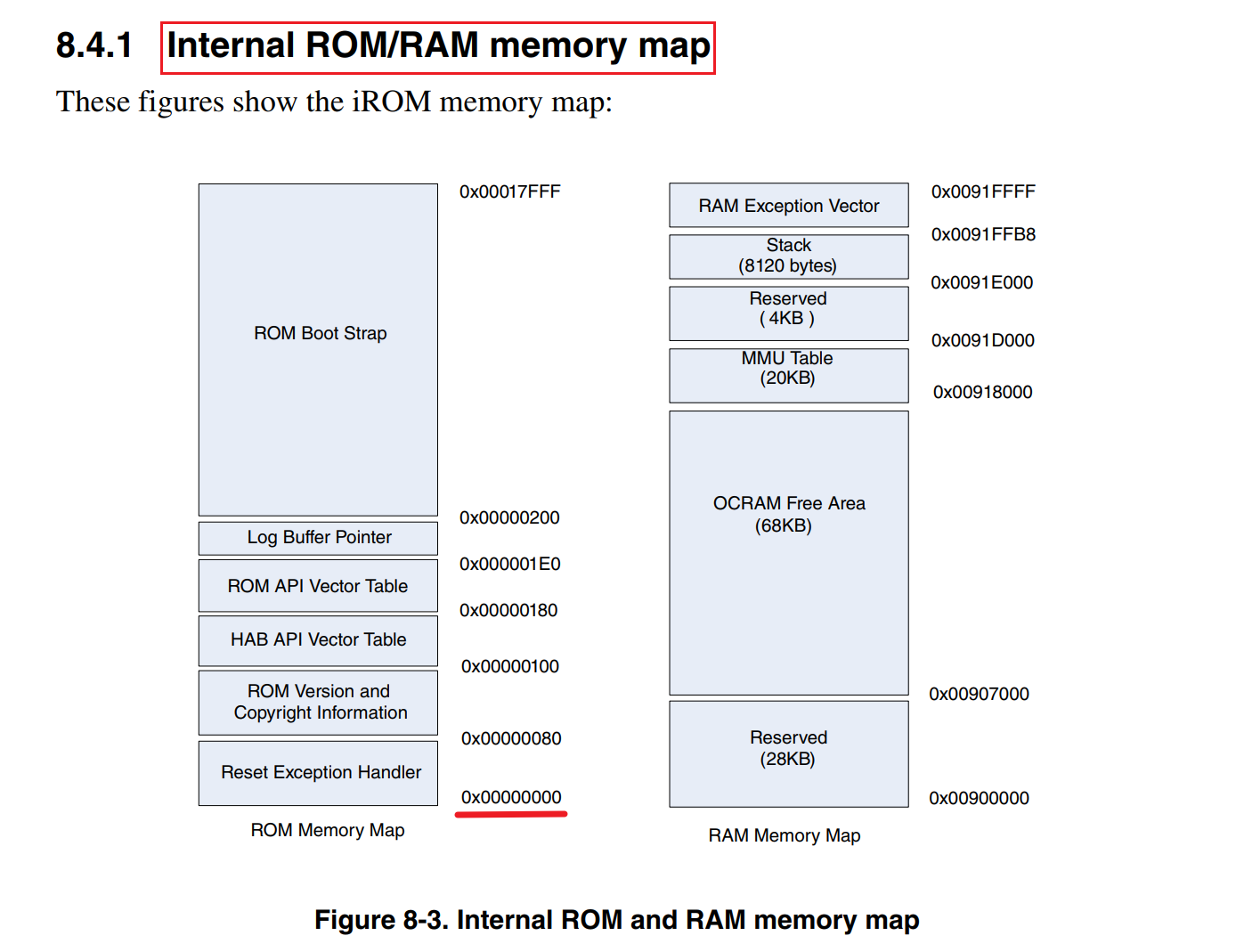
iROM是芯片内部自带的ROM,里面存放的也是一段程序。也就是说,imx6ull芯片上电后第一个执行的就是其内部iROM的一段程序,这段程序是芯片厂商写好并固化在imx6ull芯片iROM中的。 与生俱来,那iROM里面的程序有什么用,为什么要执行这段程序而不是直接执行我们下载到外部flash或者emmc中的程序呢?这段程序是NXP官方写的,它的源代码是不对外开放的。
2.2 启动方式
这段iROM代码是为了方便用户做的,我们都知道我们的开发板或者其他大多数开发板板都有一个拨码开关,我们可以拨动拨码开关来设置芯片的启动方式(nand启动、emmc启动或者sd卡启动等), 为什么可以设置其启动方式?我们写的程序它都还没加载,是谁赋予了它这个能力?这就是iROM的作用,他会根据系统复位后当前的boot启动模式配置引脚的电平状态来决定从哪里加载u-boot,如下图所示:
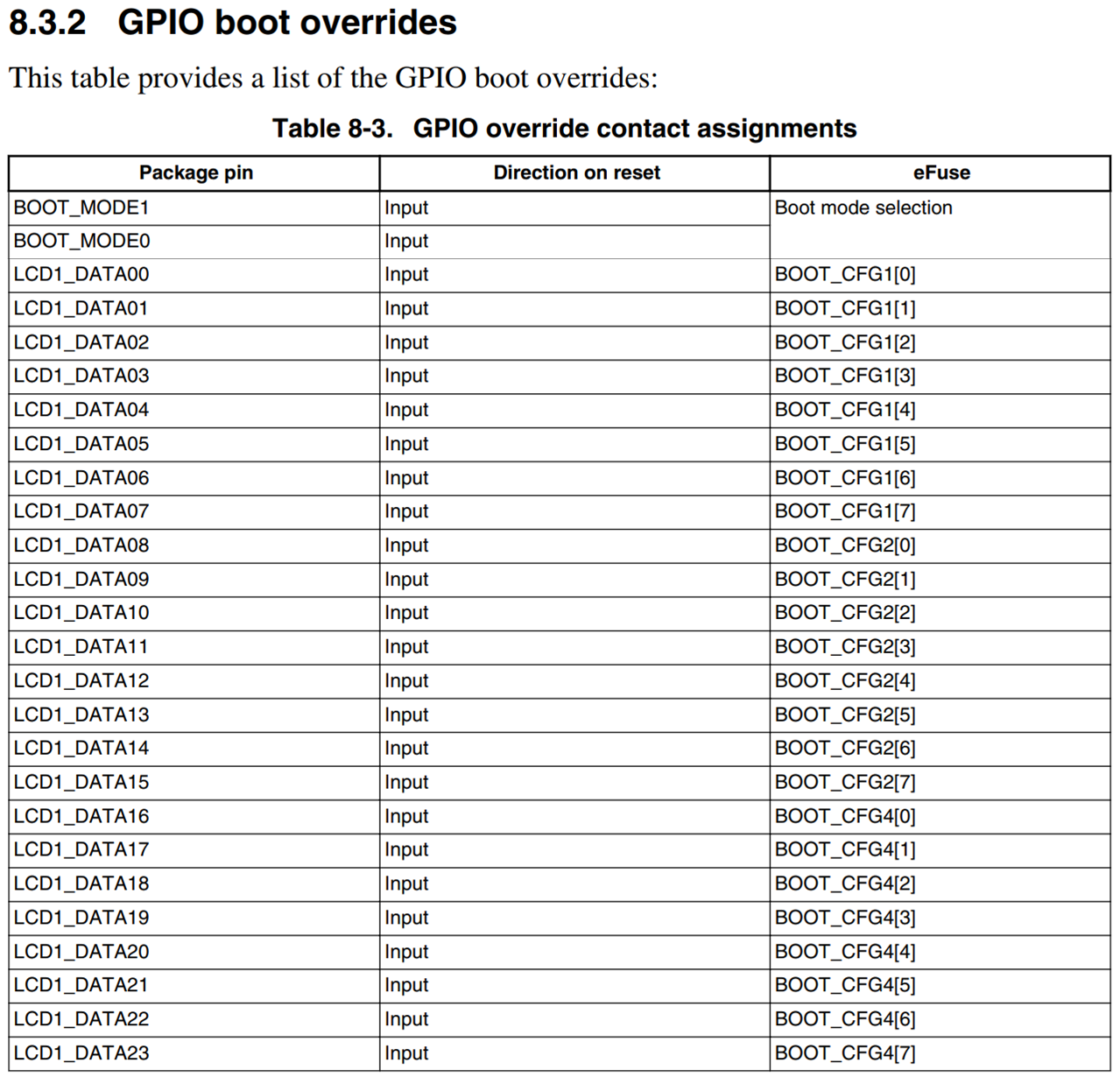
这里面的引脚都控制什么?我们可以看这里:《01嵌入式开发/02IMX6ULL平台/LV04-裸机开发/LV04-01-IMX6ULL启动流程-01-启动方式.md》
2.3 启动流程
iROM启动流程如下图所示,大致是分成两种启动模式,第一种是下载模式,第二种是内部引导模式,复位后检查boot引脚电平状态,判断是使用那种引导模式,若是内部引导模式,则加载并验证引导镜像,然后执行引导程序;否则进入串口(USB或UART)下载模式,下载完之后便执行引导程序。
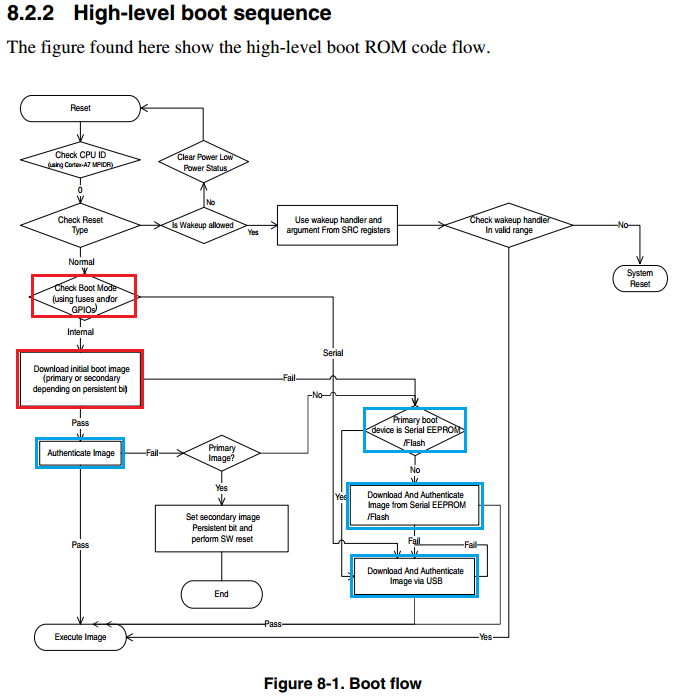
再来看下其启动流程图:
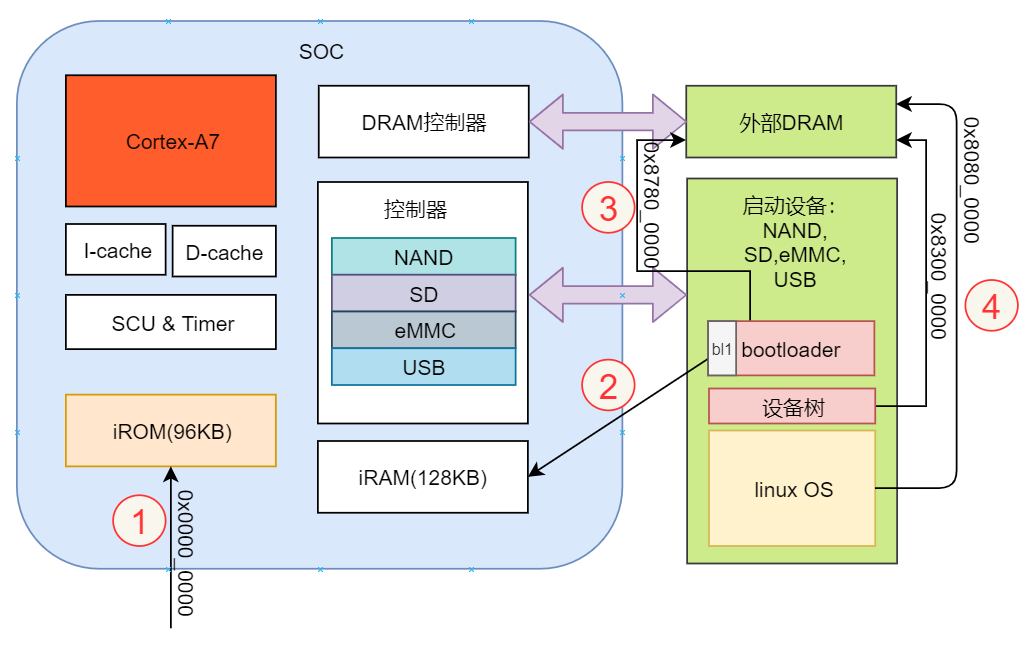
可以分为四个步骤:
- 芯片上电默认到0x0000_0000地址(iROM)处取指,iROM内部固化的程序(就是前面学习的boot ROM程序)负责完成系统基本功能的初始化,如时钟和堆栈,然后iROM从一个特定的启动设备中引导镜像(bootloader)到内部128KB的RAM中,iROM通过判断拨码开关状态来决定启动设备(Flash、eMMC、SD等),并根据安全引导键值执行完整性检查引导镜像。
- 将启动设备中的前4KB数据拷贝到iRAM中运行,这段数据包含了Program image(飞思卡尔定义的一个镜像数据结构,就是前面学习映像文件的IVT等相关信息),它包含了启动数据的地址以及长度,告诉boot ROM将启动数据拷贝到哪里以及拷贝多大,然后初始化外部DRAM控制器。
- 在初始化完DRAM控制器之后,bootloader主体部分被拷贝至外部DRAM中(就是DDR),bootloader随后便将linux操作系统镜像从启动设备加载到DRAM中,并对OS完整性检查。
- 引导完成之后,bootloader跳到操作系统中去运行,启动Linux内核。
二、Linux内核又做了哪些事情
1. linux启动后做了什么?
linux启动以后,接着就是挂载文件系统。那么有个问题,linux和文件系统是什么关系?linux启动以后不挂载文件系统可以么?
Linux和STM32上谈到的传统的ucos、FreeRTOS不一样,Linux运行以后必须挂载文件系统,注意!是在linux运行后才挂载的。那安卓系统又是什么系统? 安卓系统也是基于Linux系统的,他和Qt、ubuntu系统一样都基于linux系统,区分他们的就是文件系统不一样,这好几套系统底层全是Linux。
Linux内核启动以后就开始挂载文件系统,然后找到找到文件系统中的初始化脚本,开始启动一个又一个服务(或应用程序)。挂载文件系统的方式有两种,一种是 通过nfs的方式挂载网络文件系统,另一种方式是从块设备挂载文件系统,以那种方式挂载,取决于对bootargs中root参数的设置,设置 rootfstype参数以表示挂载的文件系统的 类型。如“bootargs=console=ttymxc0,115200 root=/dev/mmcblk0p2 rw init=/linuxrc rootfstype=ext2”表示使用串口0作为控制终端,挂载mmc中第0块的第二个扇区作为文件系统,文件系统类型为ext2。 init参数是什么?这是我们接下来要学习的。
2. 传统的启动方式
在以前,当Linux启动后,首先需要禁止中断并进入SVC模式,然后配置好各种环境,之后创建第一个进程, 也就是init进程,该进程完成了根文件系统的挂载,init是Linux系统操作中不可缺少的程序之一, 所谓的init进程,它是一个由内核启动的用户级进程。内核会在过去曾使用过init的几个地方查找它, 它的正确位置(对Linux系统来说)是/sbin/init。如果内核找不到init,它就会试着运行/bin/sh, 如果没有找到或者运行失败,那么系统的启动也会失败。内核自行启动(已经被载入内存,开始运行, 并已初始化所有的设备驱动程序和数据结构等)之后,就通过启动一个用户级程序init的方式,完成引导进程。 所以init始终是第一个进程(其进程编号始终为1)。
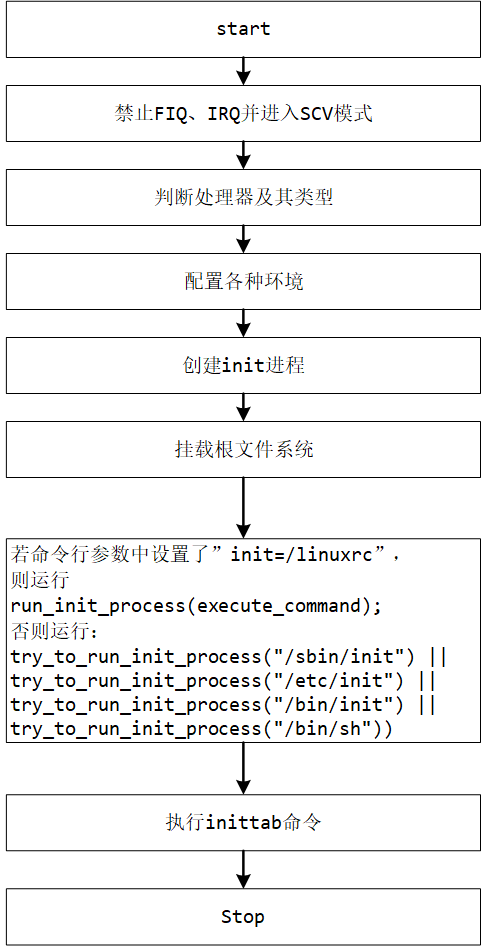
/etc/init的主要的功能就是准备软件运行的环境,包括系统的主机名称、网络配置、语系处理、文件系统格式及其他服务的启动等。 而启动init进程的配置文件是/etc/inittab,/etc/inittab文件是init在启动时读取的配置文件,也就是指挥官的决策书, 这个决策书规定了当前战争的局势,比如和平局势、冷战局势、战争局势。以及该局势下的核心策略。 init就是这样,通过inittab这个文件控制了计算机的启动级别,及该级别下启动的进程。 我们一般默认的启动级别是5,其启动级别可配置为0~6,当设为0时,代表系统停机,你可以尝试输入“init 0”指令查看系统是否停机,当设置为6时,系统会重启。 init启动脚本位置位于/etc/init.d目录符号链接到不同的 RunLevel 目录 (比如/etc/rc3.d、/etc/rc5.d等)。
传统的init启动也带来了一些问题
- 启动时间太长。init进程是串行启动的,也就是说只有当前一个进程启动之后才能接着启动下一个进程。
- 启动脚本复杂。init进程只是执行启动脚本,并不搭理其他事情,脚本需要自己处理各种情况,如此会使得脚本变得很长。
3. Systemd启动方式
说明:我移植的4.19版本的内核好像还是原来的方式,这里还是以教程中的图为准吧。
现在,采用的是systemd方式启动,systemd就是为了解决传统init启动问题而诞生的。其设计目标是,为系统的启动和管理提供一套完整的解决方案。
systemd即为system daemon,是linux下的一种init软件,由Lennart Poettering带头开发, 并在LGPL 2.1及其后续版本许可证下开源发布,开发目标是提供更优秀的框架以表示系统服务间的依赖关系, 并依此实现系统初始化时服务的并行启动,同时达到降低Shell的系统开销的效果,最终代替常用的System V与BSD风格init程序。 当内核自解压完成,则加载systemd进程,并转移控制权到systemd。
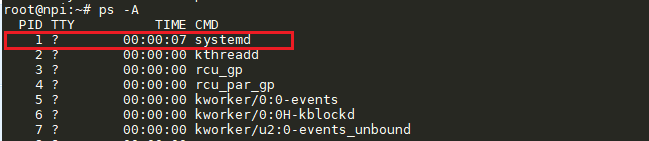
输入“ps -A”查看所有进程,可以看到Systemd的进程PID为1,说明它是系统启动后运行的第一个进程,其他程序的启动由它负责, 功能还包括日志进程、控制基础系统配置,维护登陆用户列表以及系统账户、运行时目录和设置,可以运行容器和虚拟机, 可以简单的管理网络配置、网络时间同步、日志转发和名称解析等。
在传统的init进程的配置文件是/etc/inittab,各种服务的配置文件存放在/etc/sysconfig目录。现在的配置文件主要存放在/lib/systemd目录, 在/etc/systemd目录里面的修改可以覆盖原始设置。且传统的init启动模式中,会有runlevel(运行等级)的概念,在Systemd启动方式中,它被称为一种Target, 与之不同的是,runlevel是互斥的,也就是说不能同时有多个runlevel启动,而target允许多个启动。
| runlevel | Target | 注释 |
|---|---|---|
| 0 | poweroff.target | 关闭系统 |
| 1 | rescue.target | 维护模式(单用户模式) |
| 2,3,4 | multi-user.target | 多用户,无图形界面。用户可以通过终端或网络登录。 |
| 5 | graphical.target | 多用户,图形界面。继承级别3的服务,并启动图形界面服务。 |
| 6 | reboot.target | 重启系统 |
我们输入以下命令:
1 | systemd-analyze plot > boot.svg |
可以查看系统启动时都做了哪些工作,输入此命令后, 系统把整个引导过程写入一个SVG格式文件里。整个引导过程非常长不方便阅读, 所以通过这个命令我们可以把输出写入一个文件,之后再查看和分析。
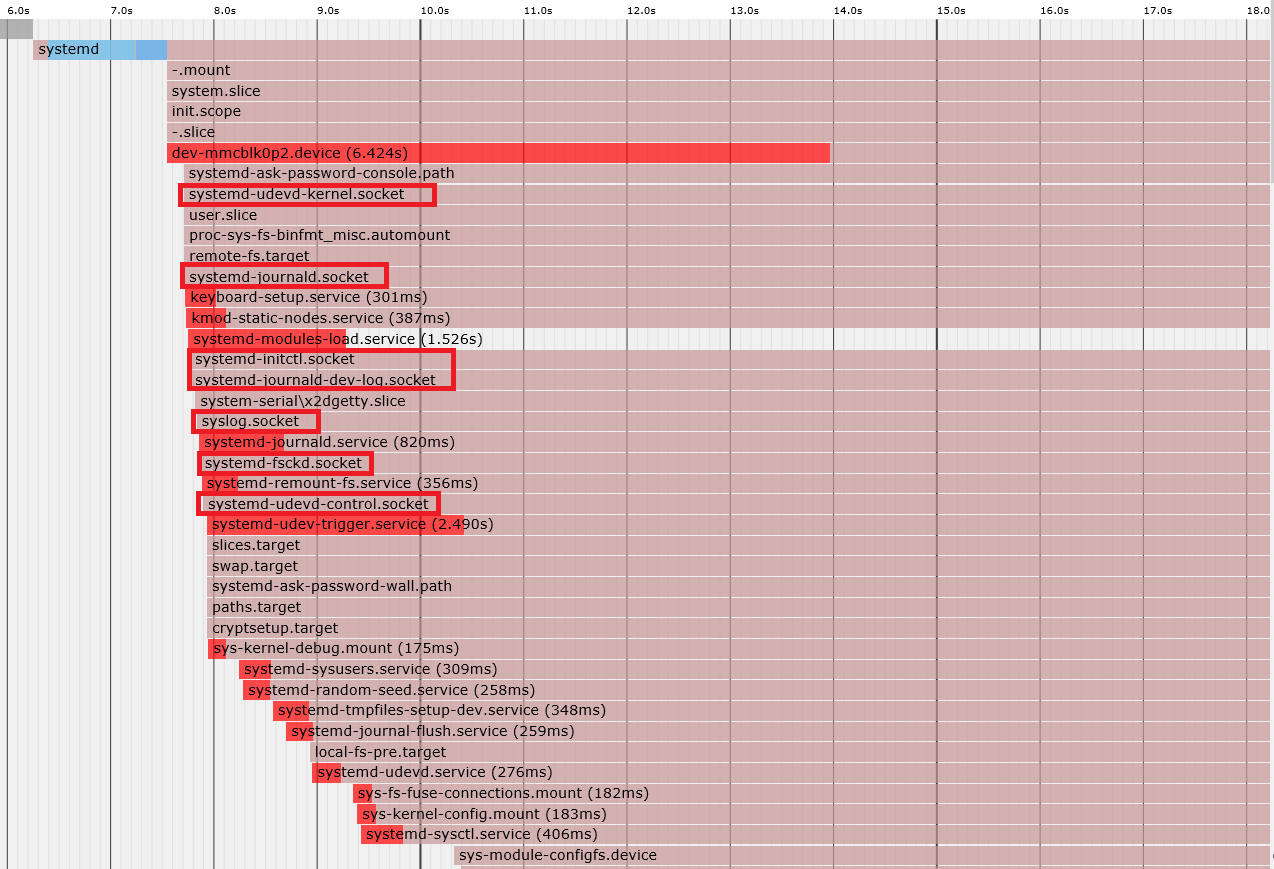
可以看到系统以systemd为首,创建了很多服务。比如创建打印logo服务、dbus服务、avahi服务、系统登陆服务等。 与init相比,Systemd采用的时并行启动,它为每个需要启动的守护进程建立一个套接字(如上图所示.socket),这样使得 不同进程之间实现信息交互。且Systemd会创建新的进程并且为其分配一个控制组,而且处于不同控制组的进程之间可以实现互相通信。 Systemd 初始化系统引导,完成相关的初始化工作,它执行default.target以获得设定的启动target(输入“systemctl get-default”命令可知默认的target为graphical.target),接着Systemd执行相应的启动单元文件, 依据单元文件中定义的依赖关系,传递控制权,依次执行其他的target单元文件。
我们输入
1 | cat /lib/systemd/system/graphical.target |
命令,查看默认的target→graphical.target单元文件的依赖关系。
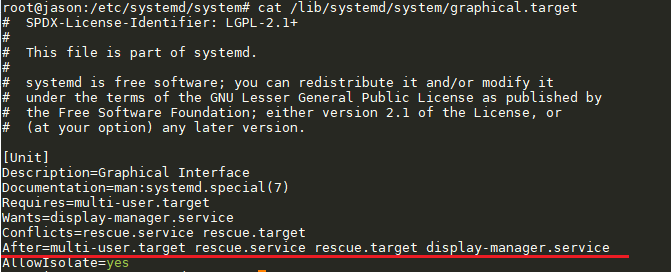
由上可知,他将启动multi-user.target、rescue.service、rescue.target、display-manager.service,而multi-user.target 又有相关的依赖,继续查看multi-user.target单元文件的依赖关系。
根据依赖关系总结得出它会依次执行multi-user.target→basic.target→sysinit.target→local-fs.target→local-fs-pre.target→… 同时启动的每个 target 包含位于/etc/systemd/system/目录下的Unit。
systemd先到这里,后面我们将详细学习systemd。
三、启动过程总结
