本文主要是天猫蓝牙Mesh项目——初级开发 设备接入天猫精灵 的相关笔记,若笔记中有错误或者不合适的地方,欢迎批评指正😃。
点击查看使用工具及版本
| Windows版本 | windows11 |
| Ubuntu版本 | Ubuntu22.04的64位版本 |
| VMware® Workstation 16 Pro | 16.2.3 build-19376536 |
| 终端软件 | MobaXterm(Professional Edition v23.0 Build 5042 (license)) |
点击查看本文参考资料
点击查看相关文件下载
这一LV的笔记起始跟前面有所重叠,互相补充吧算是。
一、创建风扇控制工程
(1)复制key_fan工程,更名为fan_node。
(2)修改fan_node.mk文件,工程和文件名,并开启天猫精灵认证宏和厂商模型服务。
1
2
3
| GLOBAL_DEFINES += GENIE_OLD_AUTH
MESH_MODEL_VENDOR_SRV = 1
|
(3)配置天猫精灵三元组信息。
在 genie-bt-mesh-stack-master/genie_app/base/tri_tuple_default.h 文件中。
1
2
3
| #define DEFAULT_PID 18662569
#define DEFAULT_SECRET "xxxxxxxxxxxxxxxxxxxxxxxxxxxxxxxx"
#define DEFAULT_MAC "xxxxxxxxxxxx"
|
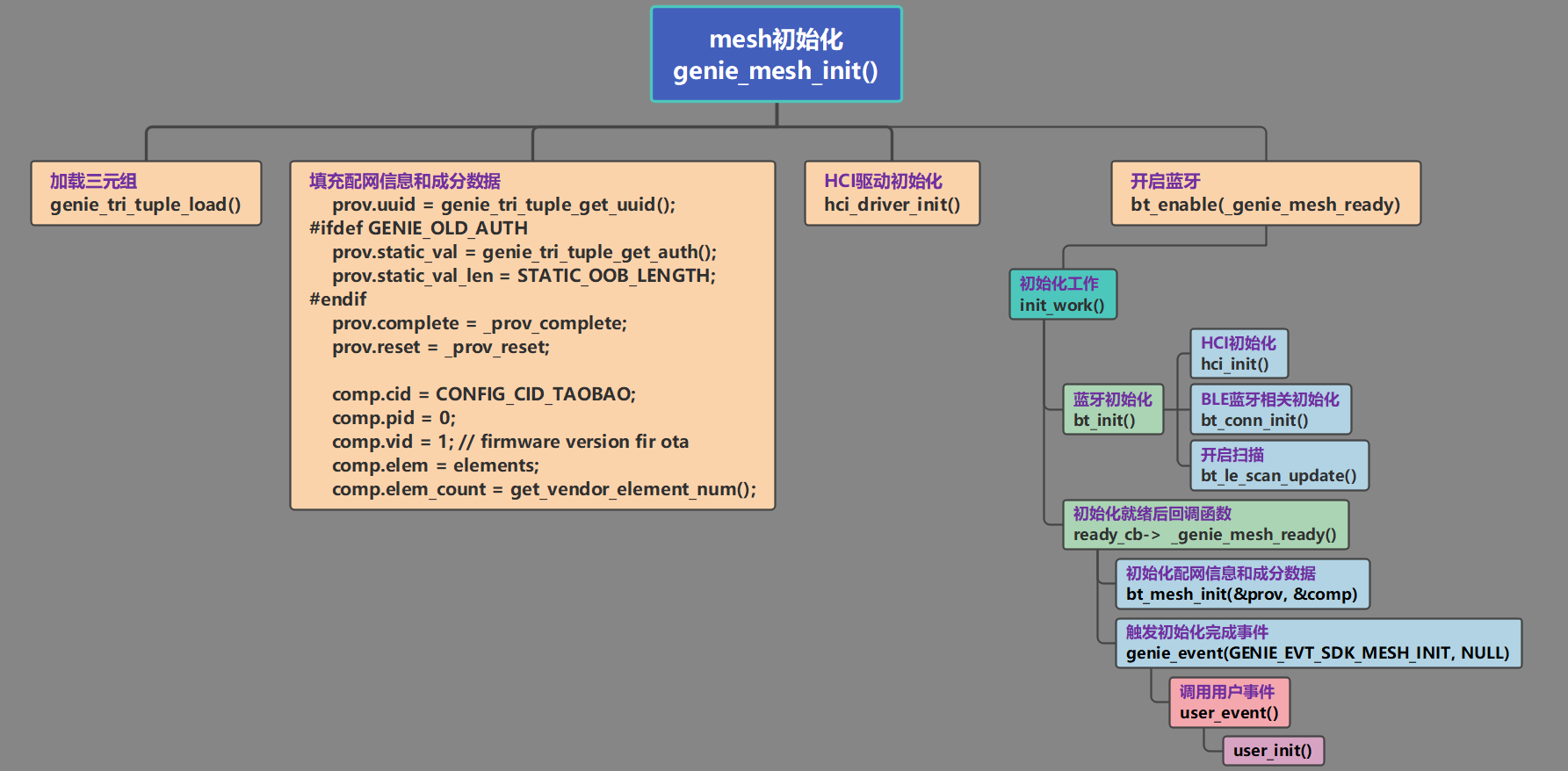
二、初始化流程代码分析
1. 函数调用关系
![genie_mesh_init初始化流程]()
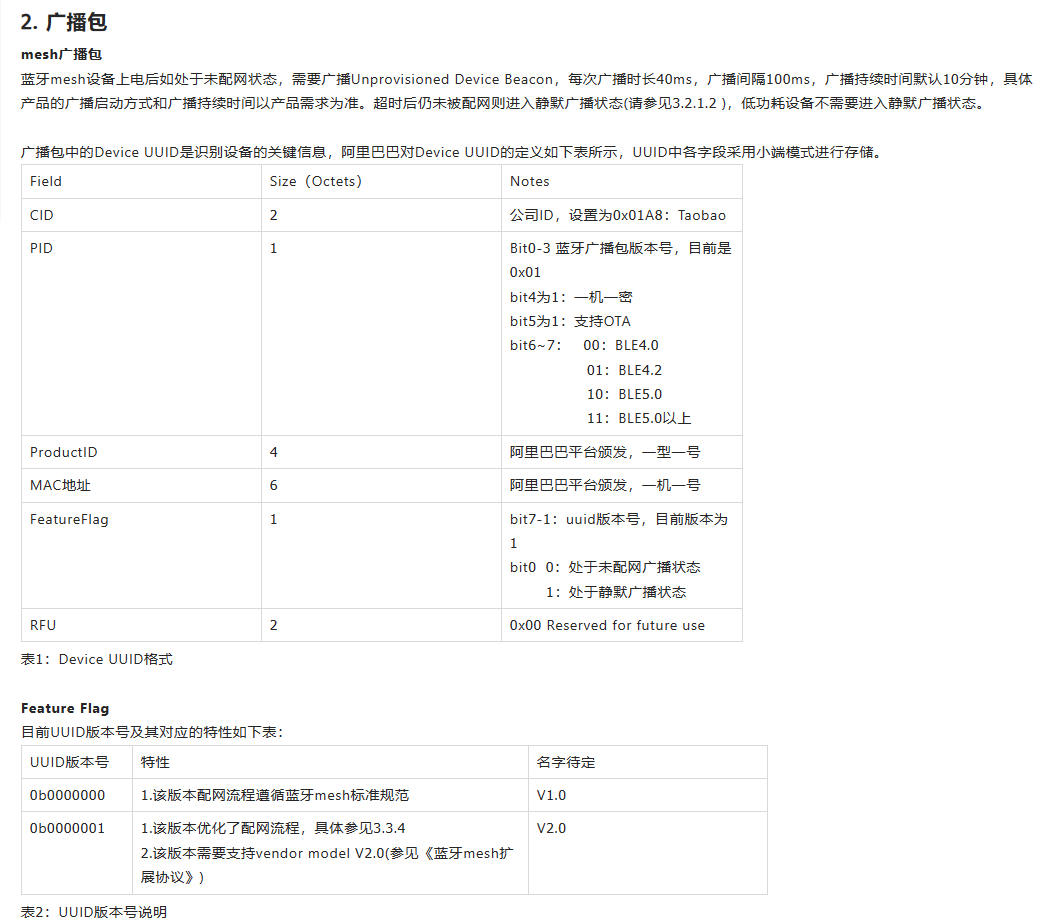
2. 配网信息广播包
2.1 UUID格式
下面这个表在AliGenie开发者平台 (tmall.com)——天猫精灵蓝牙mesh软件基础规范的3.2.1 mesh广播包一节,新的文档中也有,只是有些许不同,但大概都是一个意思,新的文档在这里:蓝牙Mesh模组软件规范——UUID格式-生活物联网平台(飞燕平台)-阿里云帮助中心 (aliyun.com)
![天猫精灵广播包]()
2.2 代码中组合UUID
下面两个函数都位于genie_app/base/tri_tuple.c中:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
| int8_t genie_tri_tuple_load(void)
{
char l_mac[] = DEFAULT_MAC;
char l_key[] = DEFAULT_SECRET;
E_GENIE_FLASH_ERRCODE ret;
ret = genie_flash_read_trituple(&g_pid, g_mac, g_key);
if(ret != GENIE_FLASH_SUCCESS) {
BT_ERR("read error, use default");
g_pid = DEFAULT_PID;
stringtohex(l_key, g_key, 16);
stringtohex(l_mac, g_mac, 6);
return -1;
}
return 0;
}
uint8_t *genie_tri_tuple_get_uuid(void)
{
int i;
g_uuid[0] = 0xa8;
g_uuid[1] = 0x01;
g_uuid[2] = 0x71;
for (i = 0; i < 4; i++) {
g_uuid[3 + i] = (g_pid >> (i<<3)) & 0xFF;
}
for (i = 0; i < 6; i++) {
g_uuid[7 + i] = g_mac[5 - i];
}
g_uuid[13] = UNPROV_ADV_FEATURE_AUTO_BIND_MODEL_SUB;
g_uuid[14] = UNPROV_ADV_FLAG_GENIE_MESH_STACK;
#ifdef GENIE_ULTRA_PROV
g_uuid[14] |= UNPROV_ADV_FEATURE_ULTRA_PROV;
#endif
BT_INFO("uuid: %s", bt_hex(g_uuid, 16));
return g_uuid;
}
|
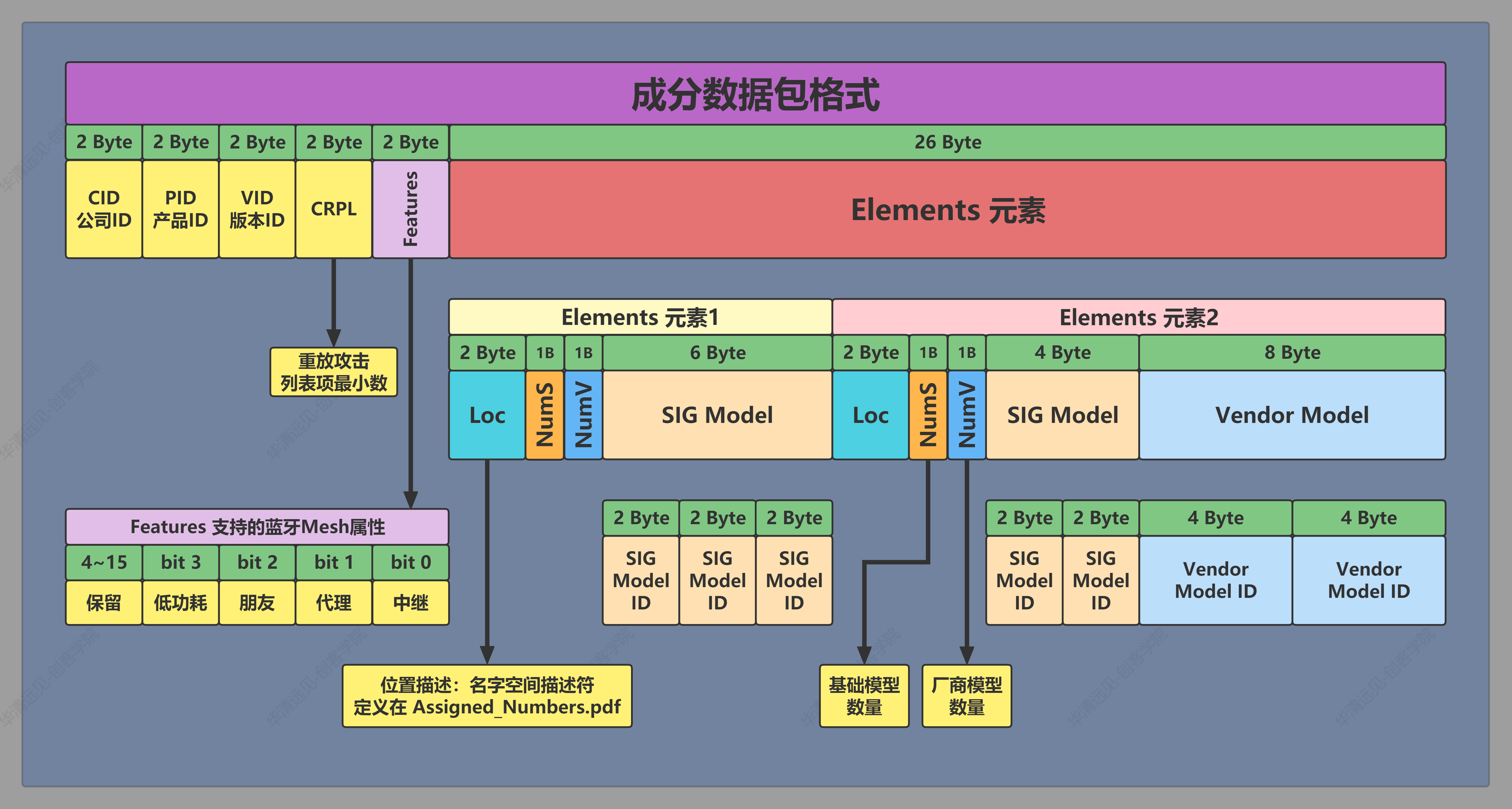
3. 成分数据
3.1 成分数据包格式
![成分数据包格式]()
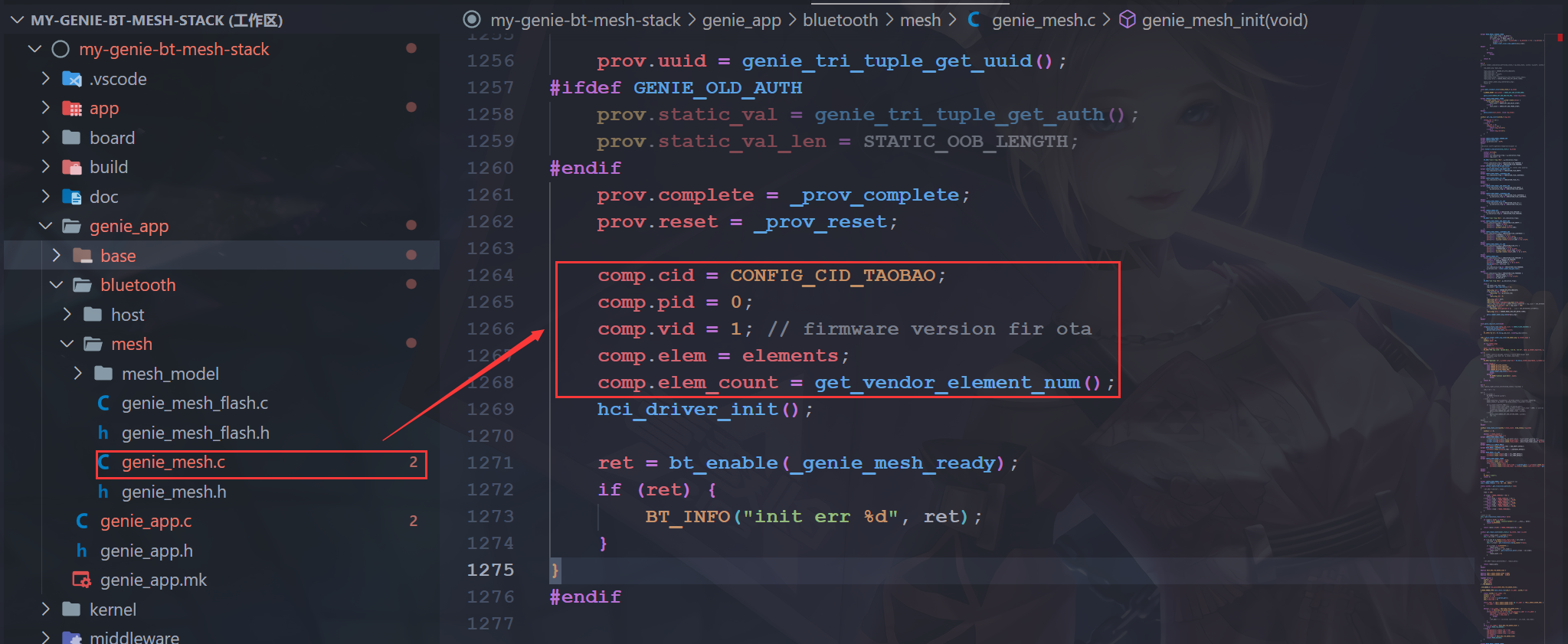
3.2 代码实现
![image-20231231105113226]()
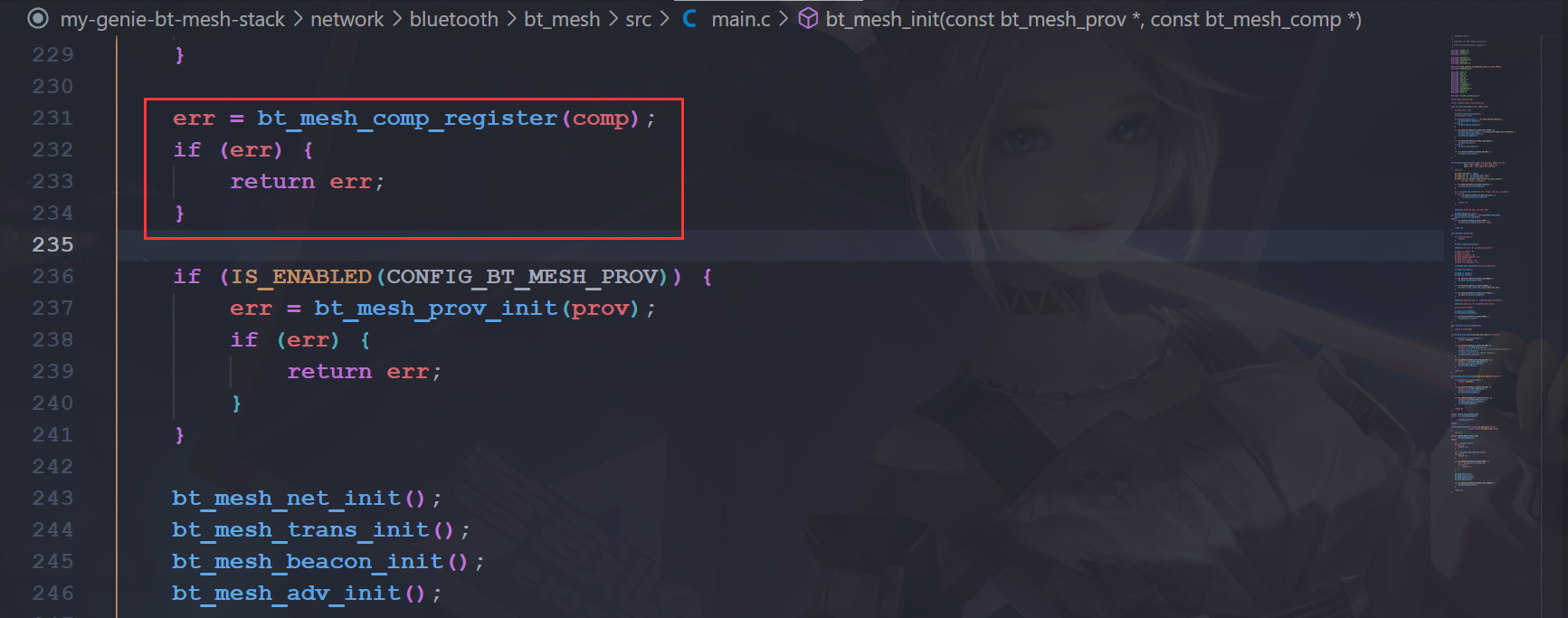
成分数据注册是在network/bluetooth/bt_mesh/src/main.c的bt_mesh_init()函数中:
![image-20231231105645441]()
4. 元素封装
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
|
#define MESH_ELEM_COUNT 1
#define MESH_ELEM_STATE_COUNT MESH_ELEM_COUNT
elem_state_t g_elem_state[MESH_ELEM_STATE_COUNT];
static struct bt_mesh_model element_models[] = {
BT_MESH_MODEL_CFG_SRV(),
BT_MESH_MODEL_HEALTH_SRV(),
#ifdef CONFIG_MESH_MODEL_GEN_ONOFF_SRV
MESH_MODEL_GEN_ONOFF_SRV(&g_elem_state[0]),
#endif
};
static struct bt_mesh_model g_element_vendor_models[] = {
#ifdef CONFIG_MESH_MODEL_VENDOR_SRV
MESH_MODEL_VENDOR_SRV(&g_elem_state[0]),
#endif
};
struct bt_mesh_elem elements[] = {
BT_MESH_ELEM(0, element_models, g_element_vendor_models, 0),
};
|
三、代码实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
160
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
|
static float last_speed = 0.0;
static uint8_t vendor_fan_ctrl(vnd_model_msg *p_msg)
{
float speed = 0.0;
if(p_msg == NULL)
{
printf("p_msg 错误\r\n");
goto error;
}
if(p_msg->len == 3)
{
if(p_msg->data[0] == 0x21 && p_msg->data[1] == 0x05)
{
if(p_msg->data[2] == 0)
current_status = FOREWARD;
else if(p_msg->data[2] == 1)
current_status = REVERSAL;
fan_ctrl(current_status,current_speed);
}
else if(p_msg->data[0] == 0x0A && p_msg->data[1] == 0x01)
{
speed = ((float)p_msg->data[2]) / 10;
fan_ctrl(current_status,speed);
}
else
{
printf("属性类型不支持\r\n");
goto error;
}
}
else if(p_msg->len == 5)
{
if(p_msg->data[0] == 0x0B && p_msg->data[1] == 0xF0)
{
if(p_msg->data[2] == 0x0A && p_msg->data[3] == 0x01)
{
speed = current_speed;
if(p_msg->data[4] == 0x01)
{
speed += 0.1;
if(speed > 1)
speed = 1;
}
else if(p_msg->data[4] == 0xFF)
{
speed -= 0.1;
if(speed < 0)
speed = 0;
}
else
goto error;
fan_ctrl(current_status,speed);
}
}
else
goto error;
}
return 0;
error:
return 1;
}
static uint8_t vendor_fan_status_send(void)
{
vnd_model_msg reply_msg;
uint8_t payload[3] = {0};
static uint8_t tid = 0;
uint16_t attr_type = SPEED_TYPE;
payload[0] = attr_type & 0xff;
payload[1] = (attr_type >> 8) & 0xff;
payload[2] = (uint8_t)(current_speed*10);
reply_msg.opid = VENDOR_OP_ATTR_STATUS;
reply_msg.tid = tid++;
reply_msg.data = payload;
reply_msg.len = sizeof(payload);
reply_msg.p_elem = &elements[0];
reply_msg.retry_period = 120 + 300;
reply_msg.retry = 1;
genie_vendor_model_msg_send(&reply_msg);
printf("发送风扇风速 = %u tid = %u\r\n",payload[2],reply_msg.tid);
}
u16_t vendor_model_msg_handle(vnd_model_msg *p_msg)
{
printk("vendor model message received\n");
if (!p_msg)
return -1;
printf("opcode:0x%x, tid:%d, len:%d\r\n", p_msg->opid, p_msg->tid, p_msg->len);
if (p_msg->data && p_msg->len)
printk("payload: %s", bt_hex(p_msg->data, p_msg->len));
switch (p_msg->opid) {
case VENDOR_OP_ATTR_GET_STATUS:
printf("获得属性状态\r\n");
break;
case VENDOR_OP_ATTR_SET_ACK:
printf("设置属性状态需应答\r\n");
if(vendor_fan_ctrl(p_msg) == 0)
{
printf("设置成功\r\n");
genie_vendor_model_msg_send(p_msg);
}
break;
case VENDOR_OP_ATTR_SET_UNACK:
printf("设置属性状态不需应答\r\n");
break;
case VENDOR_OP_ATTR_CONFIME:
break;
case VENDOR_OP_ATTR_TRANS_MSG:
break;
default:
break;
}
return 0;
}
void user_event(E_GENIE_EVENT event, void *p_arg)
{
E_GENIE_EVENT next_event = event;
switch(event) {
case GENIE_EVT_SW_RESET:
case GENIE_EVT_HW_RESET_START:
BT_DBG("FLASH x5");
led_flash(5);
reset_light_para();
break;
case GENIE_EVT_SDK_MESH_INIT:
user_init();
if (!genie_reset_get_flag()) {
next_event = GENIE_EVT_SDK_ANALYZE_MSG;
}
break;
case GENIE_EVT_SDK_MESH_PROV_SUCCESS:
BT_DBG("FLASH x3");
led_flash(3);
break;
case GENIE_EVT_SDK_ACTION_DONE:
{
elem_state_t *p_elem = (elem_state_t *)p_arg;
#if defined(CONFIG_MESH_MODEL_GEN_ONOFF_SRV)
if(p_elem->state.onoff[0] == 0)
{
fan_ctrl(current_status,0.0);
last_speed = current_speed;
printf("关闭风扇\r\n");
}
else if(p_elem->state.onoff[0] == 1)
{
fan_ctrl(current_status,last_speed);
printf("开启风扇\r\n");
}
#endif
break;
}
#ifdef CONFIG_MESH_MODEL_VENDOR_SRV
case GENIE_EVT_SDK_INDICATE:
break;
case GENIE_EVT_SDK_VENDOR_MSG:
{
printf("进入到厂商消息\r\n");
vendor_model_msg_handle((vnd_model_msg *)p_arg);
break;
}
#endif
case GENIE_EVT_HW_RESET_DONE:
printk("GENIE_EVT_HW_RESET_DONE\n");
break;
default:
break;
}
if(next_event != event) {
genie_event(next_event, p_arg);
}
}
|