LV16-15-串口通信-01-串口通信基础
本文主要是STM32开发——串口通信基础知识的一些相关笔记,若笔记中有错误或者不合适的地方,欢迎批评指正😃。
点击查看使用工具及版本
| Windows | windows11 |
| Ubuntu | Ubuntu16.04的64位版本 |
| VMware® Workstation 16 Pro | 16.2.3 build-19376536 |
| SecureCRT | Version 8.7.2 (x64 build 2214) - 正式版-2020年5月14日 |
| 开发板 | 正点原子 i.MX6ULL Linux阿尔法开发板 |
| uboot | NXP官方提供的uboot,NXP提供的版本为uboot-imx-rel_imx_4.1.15_2.1.0_ga(使用的uboot版本为U-Boot 2016.03) |
| linux内核 | linux-4.15(NXP官方提供) |
| STM32开发板 | 正点原子战舰V3(STM32F103ZET6) |
点击查看本文参考资料
- 通用
| 分类 | 网址 | 说明 |
| 官方网站 | https://www.arm.com/ | ARM官方网站,在这里我们可以找到Cotex-Mx以及ARMVx的一些文档 |
| https://www.st.com/content/st_com/zh.html | ST官方网站,在这里我们可以找到STM32的相关文档 | |
| https://www.stmcu.com.cn/ | 意法半导体ST中文官方网站,在这里我们可以找到STM32的相关中文参考文档 | |
| http://elm-chan.org/fsw/ff/00index_e.html | FatFs文件系统官网 | |
| 教程书籍 | 《ARM Cortex-M3权威指南》 | ARM公司专家Joseph Yiu(姚文祥)的力作,中文翻译是NXP的宋岩 |
| 《ARM Cortex-M0权威指南》 | ||
| 《ARM Cortex-M3与Cortex-M4权威指南》 | ||
| 开发论坛 | http://47.111.11.73/forum.php | 开源电子网,正点原子的资料下载及问题讨论论坛 |
| https://www.firebbs.cn/forum.php | 国内Kinetis开发板-野火/秉火(刘火良)主持的论坛,现也做STM32和i.MX RT | |
| https://www.amobbs.com/index.php | 阿莫(莫进明)主持的论坛,号称国内最早最火的电子论坛,以交流Atmel AVR系列单片机起家,现已拓展到嵌入式全平台,其STM32系列帖子有70W+。 | |
| http://download.100ask.net/index.html | 韦东山嵌入式资料中心,有些STM32和linux的相关资料也可以来这里找。 | |
| 博客参考 | http://www.openedv.com/ | 开源网-原子哥个人博客 |
| http://blog.chinaaet.com/jihceng0622 | 博主是原Freescale现NXP的现场应用工程师 | |
| cortex-m-resources | 这其实并不算是一个博客,这是ARM公司专家Joseph Yiu收集整理的所有对开发者有用的官方Cortex-M资料链接(也包含极少数外部资源链接) |
- STM32
| STM32 | STM32 HAL库开发实战指南——基于F103系列开发板 | 野火STM32开发教程在线文档 |
| STM32库开发实战指南——基于野火霸道开发板 | 野火STM32开发教程在线文档 |
- SD卡
| SD Association | 提供了SD存储卡和SDIO卡系统规范 |
点击查看相关文件下载
| STM32F103xx英文数据手册 | STM32F103xC/D/E系列的英文数据手册 |
| STM32F103xx中文数据手册 | STM32F103xC/D/E系列的中文数据手册 |
| STM32F10xxx英文参考手册(RM0008) | STM32F10xxx系列的英文参考手册 |
| STM32F10xxx中文参考手册(RM0008) | STM32F10xxx系列的中文参考手册 |
| Arm Cortex-M3 处理器技术参考手册-英文版 | Cortex-M3技术参考手册-英文版 |
| STM32F10xxx Cortex-M3编程手册-英文版(PM0056) | STM32F10xxx/20xxx/21xxx/L1xxxx系列Cortex-M3编程手册-英文版 |
| SD卡相关资料——最新版本 | 有关SD卡的一些资料可以从这里下载 |
| SD卡相关资料——历史版本 | 有关SD卡的一些历史版本资料可以从这里下载,比如后边看的SD卡2.0协议 |
| SD 2.0 协议标准完整版 | 这是一篇关于SD卡2.0协议的中文文档,还是比较有参考价值的,可以一看 |
一、基本概念
关于通信和串口通信的基本概念,可以看这两篇笔记:
二、STM32的串口
1. 概述
在嵌入式中,很多MCU和外设模块都集成有UART外设。 STM32F103有3个通用同步异步收发器( Universal synchronous asynchronous receiver transmitter, USART), 2个通用异步收发器( Universalasynchronous receiver transmitter, UART) 。 USART和UART的主要区别在于, USART支持同步通信, 该模式有一根时钟线提供时钟。这里需要说明一下,由于在STM中文或者是英文参考手册,相关的介绍章节主要是关于USART,但是他们都是通用的,所以笔记中也都用USART了。
串口在嵌入式中经常使用, 一般使用UART就足够了, 常见的用途如下:
(1)作为调试口, 打印程序运行的状态信息;
(2)连接串口接口的模块(比如GPS模块),传输数据;
(3)通过电平转换芯片变为RS232/RS485电平,连接工控设备;
2. USART的各种模式
这一部分我们可以查看 [STM32中文参考手册](https://www.stmcu.com.cn/Designresource/detail/localization_document /710001)的 25.5 USART模式配置 一节:
| USART模式 | USART1/2/3 | UART4 | UART5 |
|---|---|---|---|
| 异步模式 | 支持 | 支持 | 支持 |
| 硬件流控制(CTS/RTS) | 支持 | 不支持 | 不支持 |
| 多缓存通信(DMA) | 支持 | 支持 | 不支持 |
| 多处理器通信 | 支持 | 支持 | 支持 |
| 同步通信 | 支持 | 不支持 | 不支持 |
| 智能卡( Smartcard) | 支持 | 不支持 | 不支持 |
| 半双工(单线模式) | 支持 | 支持 | 支持 |
| IrDA(红外线) | 支持 | 支持 | 支持 |
| LIN(域互连网络) | 支持 | 支持 | 支持 |
3. USART内部结构
关于内部结构,我们可以查看 [STM32中文参考手册](https://www.stmcu.com.cn/Designresource/detail/localization_document /710001)的 25.3 USART功能概述 :
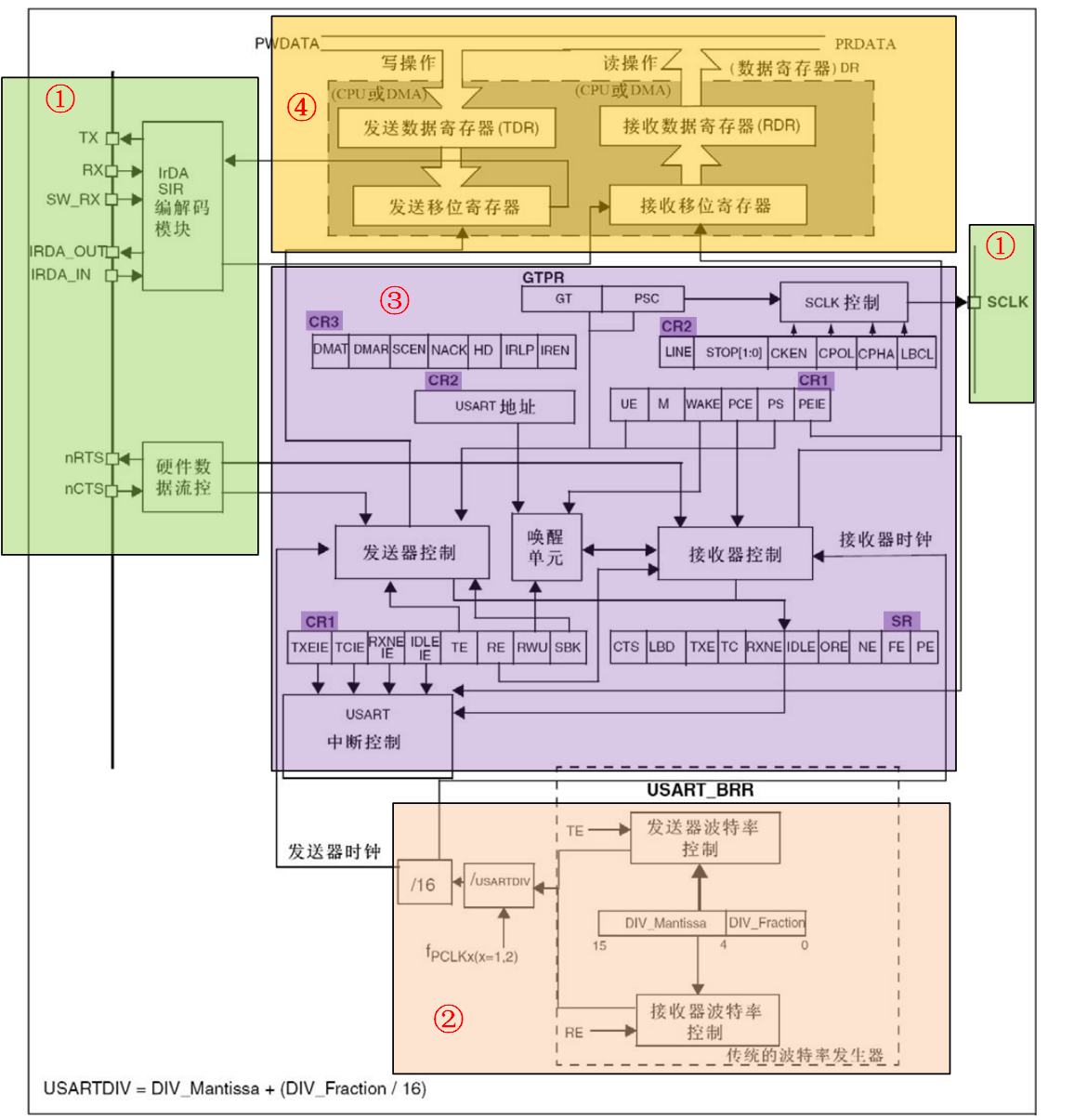
3.1 USART引脚
内部结构图中的序号①,包含了USART的相关引脚:
(1)TX:数据发送;
(2)RX:数据接收;
(3)SW_RX: 在单线和智能卡模式下接收数据, 属于内部引脚,没有具体外部引脚;
(4)nRTS: 在硬件流控制时, 用于指示本设备准备好可接收数据, 低电平说明本设备可以接收数据;
(5)nCTS:在硬件流控制时, 用于指示本设备准备好可发送数据, 低电平说明本设备可以发送数据;若是高电平,在当前数据传输结束时阻断下一次的数据发送。
(6)SCLK:有些图中直接标为CK,发送器时钟输出。在同步模式时,用于输出时钟, (在Start位和Stop位上没有时钟脉冲,软件可选地,可以在最后一个数据位送出一个时钟脉冲)。数据可以在RX上同步被接收。这可以用来控制带有移位寄存器的外部设备(例如LCD驱动器)。时钟相位和极性都是软件可编程的。在智能卡模式里, CK可以为智能卡提供时钟。
3.2 波特率发生器
内部结构图中的序号②,是USART的波特率发生器,我们通过设置USART_BRR寄存器的值,实现串口通信数据传输速率的设置。 由 [STM32中文参考手册](https://www.stmcu.com.cn/Designresource/detail/localization_document /710001) 的 25.3.4 分数波特率的产生 一节可知计算公式为:
$$
Tx/Rx 波特率 = \frac{f_{PCLK}}{16*USARTDIV}
$$
“$f_{PCLK}$”为该外设USART的时钟频率,“ USARTDIV”为USART_BRR寄存器的值。USARTDIV是一个无符号的定点数。需要注意的是在写入USART_BRR之后,波特率计数器会被波特率寄存器的新值替换。因此,不要在通信进行中改变波特率寄存器的数值。
假设所需波特率为115200,当前USART时钟为72MHz,则USARTDIV=72000000/(115200*16)=39.0625。USART_BRR寄存器使用高12位[15:4]存放整数部分, 低4位[3:0]存放小数部分, 小数部分每一位对应1/24=0.0625。 因此,整数39对应16进制为0x27,左移4位为0x270,小数0.0625, 对应0x1,所以我们设置USART_BRR=0x271即可。
在利用寄存器配置USART的波特率的时候需要依据此公式计算USART_BRR的值,而在HAL库中无需计算, 只需传入所需波特率,自动写USART_BRR寄存器值,但是我们仍然要学习这个波特率的计算公式,也许的开发调试过程中会使用到。
前面计算波特率需要知道外设时钟“$f_{PCLK}$”的值,USART1挂载APB1上, USART2/3和USART4/5挂载APB2上。 后边学习时钟系统的话,我们会知道 APB1时钟最大为36MHz, APB2时钟最大为72MHz。 因此,只有USART1的波特率计算中的“$f_{PCLK}$”能取最大系统时钟72MHz,而其它的USART/UART只能取36MHz。
3.3 发送器/接收器控制单元
通过向控制寄存器CR1、 CR2、 CR3和状态寄存器SR写入相应的位,可实现对USART数据的发送和接收控制。 其中CR1主要用于配置USART的数据位、校验位和中断使能, CR2用于配置USART的停止位和SCLK时钟控制, CR3用于CTS硬件流控制、 DMA多缓冲控制等。通过读取状态寄存器SR的值,可查询USART的状态。
3.4 数据收发寄存器单元
该部分主要由发送数据寄存器( TDR)、发送移位寄存器、接收数据寄存器( RDR)、接收移位寄存器组成。 发送移位寄存和接收移位寄存器,分别负责将发送数据并串转换和接收数据串并转换,从而实现数据在传输时,是一位一位的发送和接收。
4. 几个相关寄存器
4.1 串口时钟使能
串口作为 STM32 的一个外设,其时钟由外设时钟使能寄存器控制,这里我们使用的串口1是在APB2ENR寄存器的第14位。APB2ENR寄存器在之前已经介绍过了,这里不再介绍。只是说明一点,就是除了串口 1 的时钟使能在 APB2ENR 寄存器,其他串口的时钟使能位都在 APB1ENR 寄存器。
4.2 串口复位
当外设出现异常的时候可以通过复位寄存器里面的对应位设置,实现该外设的复位,然后重新配置这个外设达到让其重新工作的目的。一般在系统刚开始配置外设的时候,都会先执行复位该外设的操作。 串口 1 的复位是通过配置 APB2RSTR 寄存器的第 14 位来实现的。 APB2RSTR 寄存器的各位描述如图 :
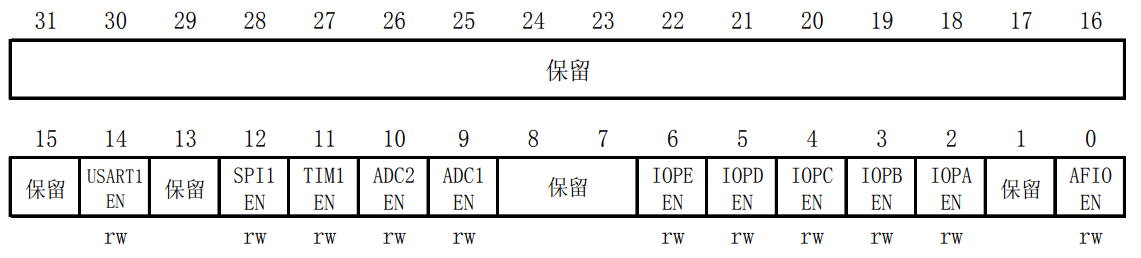
可知串口 1 的复位设置位在 APB2RSTR 的第 14 位。通过向该位写 1 复位串口 1,写 0 结束复位。其他串口的复位位在 APB1RSTR 里面。
4.3 串口波特率设置
每个串口都有一个自己独立的波特率寄存器 USART_BRR,通过设置该寄存器就可以达到配置不同波特率的目的。
4.4 串口控制
STM32 的每个串口都有 3 个控制寄存器 USART_CR1~3,串口的很多配置都是通过这 3 个寄存器来设置的。这里我们只要用到 USART_CR1 就可以实现我们的功能了 ,该寄存器的各位描述如图 :

该寄存器的高 18 位没有用到,低 14 位用于串口的功能设置。
(1)UE 为串口使能位,通过该位置 1,以使能串口。
(2)M 为字长选择位,当该位为 0 的时候设置串口为 8 个字长外加 n 个停止位,停止位的个数(n)是根据 USART_CR2 的[13:12]位设置来决定的,默认为 0。
(3)PCE 为校验使能位,设置为 0,则禁止校验,否则使能校验。
(4)PS 为校验位选择,设置为 0 则为偶校验,否则为奇校验。
(5) TXIE 为发送缓冲区空中断使能位,设置该位为 1,当 USART_SR 中的 TXE 位为1 时,将产生串口中断。
(6)TCIE 为发送完成中断使能位,设置该位为 1,当 USART_SR 中的 TC 位为 1 时,将产生串口中断。
(7)RXNEIE 为接收缓冲区非空中断使能,设置该位为 1,当 USART_SR 中的 ORE 或者 RXNE 位为 1 时,将产生串口中断。
(8)TE 为发送使能位,设置为 1,将开启串口的发送功能。
(9)RE 为接收使能位,用法同 TE。
4.5 数据发送与接收
STM32 的发送与接收是通过数据寄存器 USART_DR 来实现的,这是一个双寄存器,包含了 TDR 和 RDR。当向该寄存器写数据的时候,串口就会自动发送,当收到数据的时候,也是存在该寄存器内。

可以看出,虽然是一个 32 位寄存器,但是只用了低 9 位(DR[8: 0]),其他都是保留。DR[8: 0]为串口数据,包含了发送或接收的数据。由于它是由两个寄存器组成的,一个给发送用(TDR),一个给接收用(RDR),该寄存器兼具读和写的功能。 TDR 寄存器提供了内部总线和输出移位寄存器之间的并行接口。 RDR 寄存器提供了输入移位寄存器和内部总线之间的并行接口。
当使能校验位(USART_CR1 中 PCE 位被置位)进行发送时,写到 MSB 的值(根据数据的长度不同, MSB 是第 7 位或者第 8 位)会被后来的校验位取代。当使能校验位进行接收时,读到的 MSB 位是接收到的校验位。
4.6 串口状态
串口的状态可以通过状态寄存器 USART_SR 读取。 USART_SR 的各位描述如图 :
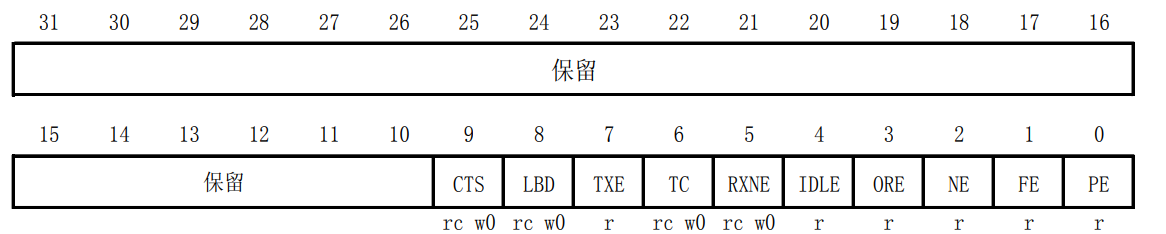
这里我们关注一下两个位,第 5、 6 位 RXNE 和 TC:
(1)RXNE(读数据寄存器非空),当该位被置 1 的时候,就是提示已经有数据被接收到了,并且可以读出来了。这时候我们要做的就是尽快去读取 USART_DR,通过读 USART_DR 可以将该位清零,也可以向该位写 0,直接清除。
(2)TC(发送完成),当该位被置位的时候,表示 USART_DR 内的数据已经被发送完成了。如果设置了这个位的中断,则会产生中断。该位也有两种清零方式: 1)读 USART_SR,写USART_DR。 2)直接向该位写 0。
5. 串口设置一般步骤
(1)串口时钟使能, GPIO 时钟使能。
(2)设置引脚复用器映射:调用 GPIO_PinAFConfig 函数。
(3)GPIO 初始化设置:要设置模式为复用功能。
(4)串口参数初始化:设置波特率,字长,奇偶校验等参数。
(5)开启中断并且初始化 NVIC,使能中断(如果需要开启中断才需要这个步骤)。
(6)使能串口。
(7)编写中断处理函数:函数名格式为 USARTxIRQHandler(x 对应串口号)。
三、HAL库函数分析
1. USART_InitTypeDef
1 | typedef struct { |
(1)BaudRate:波特率设置。一般设置为 2400、 9600、 19200、 115200。 HAL 库函数会根据设定值计算得到 UARTDIV 值,见公式 20‑1,并设置 UART_BRR 寄存器值。
(2)WordLength:数据帧字长,可选 8 位或 9 位。它设定 UART_CR1 寄存器的 M 位的值。如果没有使能奇偶校验控制,一般使用 8 数据位;如果使能了奇偶校验则一般设置为 9 数据位。
(3)StopBits:停止位设置,可选 0.5 个、 1 个、 1.5 个和 2 个停止位,它设定 USART_CR2 寄存器的STOP[1:0] 位的值,一般我们选择 1 个停止位。
(4)Parity:奇偶校验控制选择,可选 USART_PARITY_NONE (无校验)、 USART_PARITY_EVEN(偶校验) 以及 USART_PARITY_ODD (奇校验),它设置UART_CR1 寄存器的 PCE 位和 PS位的值。
(5)Mode: UART 模式选择,有 USART_MODE_RX 和 USART_MODE_TX,允许使用逻辑或运算选择两个,它设定 USART_CR1 寄存器的 RE 位和 TE 位。
2. 串口接收和发送
1 | HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout); |