LV01-01-AliOSThings-12-任务间通信-05-临界区的使用方法
本文主要是任务之间的通信——临界区的使用方法的相关笔记,若笔记中有错误或者不合适的地方,欢迎批评指正😃。
点击查看使用工具及版本
| Windows版本 | windows11 |
| Ubuntu版本 | Ubuntu22.04的64位版本 |
| VMware® Workstation 16 Pro | 16.2.3 build-19376536 |
| 终端软件 | MobaXterm(Professional Edition v23.0 Build 5042 (license)) |
点击查看本文参考资料
| 分类 | 网址 | 说明 |
| 官方网站 | 阿里云 | 阿里云官网主页 |
| 阿里生活物联平台 | 生活物联网平台(飞燕平台)主页 | |
| AliGenie | 天猫精灵开放平台AliGenie主页 | |
| 阿里物联网平台 | 阿里物联网平台主页 | |
| Bluetooth 技术网站 | 蓝牙协议规范什么的可以来这里找 | |
| Telink | Telink | Chips for a Smarter IoT (telink-semi.com) Telink中文官网 | |
| 开发手册 | AliOS Things开发指南 | AliOS Things开发指南,这里是最新版本,可以直接从官网找到 |
| AliOS Things开发指南 | AliOS Things应用开发指南,这里应该是3.3版本的完整开发文档 | |
| AliOS Things开发指南(3.0) | AliOS Things应用开发指南,这里应该是3.0版本的完整开发文档 | |
| 生活物联网平台开发文档 | 生活物联网平台(飞燕平台)开发文档 《设备端开发指南》 | |
| Wi-Fi IoT品类定义与功能开发 | 天猫精灵IoT开放平台——Wi-Fi IoT品类定义与功能开发 | |
| 硬件平台 | mk3080 WiFi开发板 | WiFi开发板使用指南-阿里云开发者社区 |
| esp8266开发板 | 一个教程:ESP8266-NodeMCU开发板详解-太极创客 (taichi-maker.com) | |
| TLSR8258 Datasheet | Datasheet for Telink BLE + IEEE802.15.4 MultiStandard Wireless SoC TLSR8258 | |
| 参考资料 | AliOS Things 3.0 应用开发指南 | 这个只是一篇参考文章,里面是一些环境搭建相关的,可以参考 |
| IP知识百科 - 华为 (huawei.com) | IP的一些相关知识点 |
点击查看相关文件下载
| 分类 | 网址 | 说明 |
| 蓝牙规范相关文档 | Core Specification 5.2 | 核心规格 5.2,该规范定义了创建可互操作的Bluetooth 设备所需的技术。 《Core_v5.2.pdf》 |
| Mesh Model(v1.1) | 本Bluetooth 规范定义了模型(以及它们所需的状态和消息),这些模型用于在mesh 网络中的节点上执行基本功能,超出了Bluetooth Mesh 配置文件 规范中定义的基础模型。 本规范包括定义跨设备类型标准功能的通用模型,以及支持关键mesh 场景的模型,如照明控制、传感器、时间和场景。 《MshMDL_v1.1.pdf》 | |
| Mesh Profile(v1.0.1) | 该Bluetooth 规范定义了基本要求,以实现可互操作的mesh 网络解决方案,用于Bluetooth 低能量无线技术。 《MshPRFv1.0.1.pdf》 | |
| Mesh Device Properties | 本规范包含Bluetooth Mesh 配置文件 和Bluetooth Mesh 模型规范所要求的设备属性的定义。 但是跟之前的有些区别,我主要看的之前的版本:《MMeshDeviceProperties_v1.2.pdf》 | |
| GATT Specification Supplement | GATT Specification Supplement | Bluetooth® Technology Website。 好像可以在线看:《GATT Specification Supplement》 | |
| Assigned Numbers | GATT的一些类型定义可以在这里找。 | |
| AliOS Things | alios-things/AliOS-Things | Gitee上的AliOSThings SDK源码仓库 |
| alibaba/AliOS-Things | GitHub上的AliOSThings SDK源码仓库 | |
| 天猫精灵蓝牙Mesh协议栈 | alibaba-archive/genie-bt-mesh-stack | GitHub上的天猫精灵蓝牙Mesh协议栈源码仓库。 之前是在alibaba/genie-bt-mesh-stack这个仓库。 写笔记的时候最新提交为faf523618a6a2560090fc423222b9db80984bb7a |
| 蓝牙Mesh设备开发指南 | 阿里云生活服务平台开发手册——蓝牙设备开发一节中的内容 |
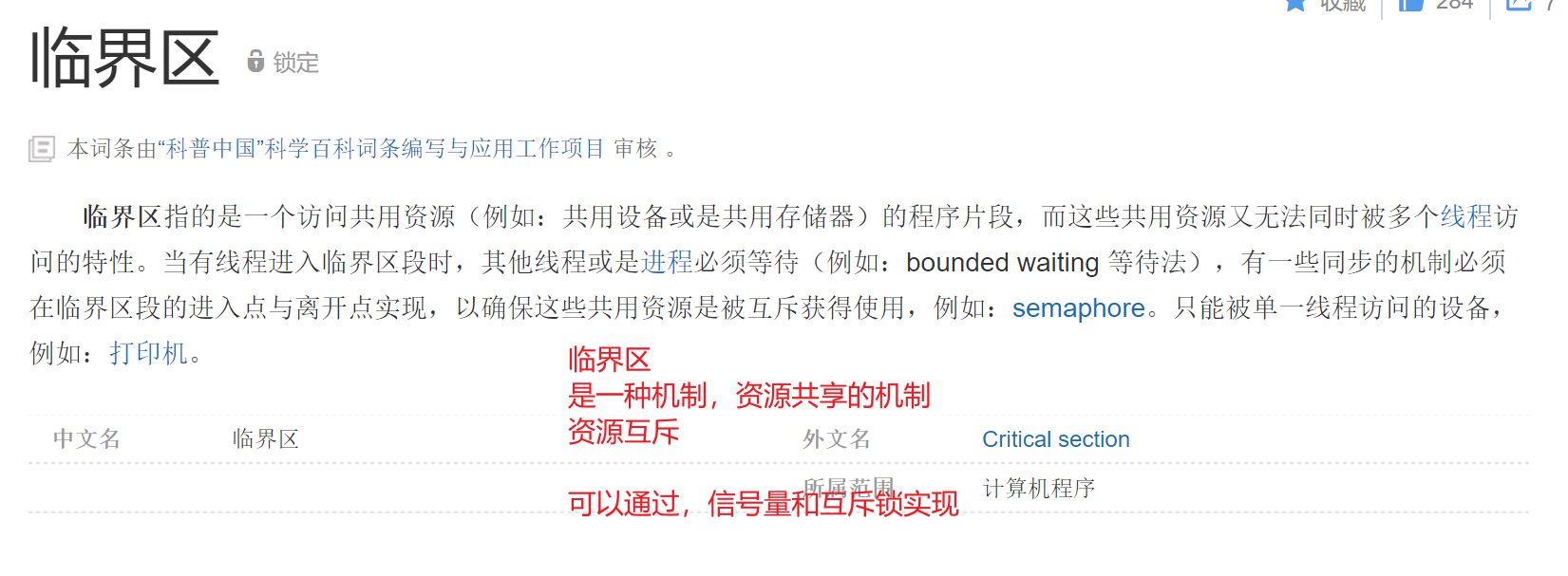
一、临界区的概念
二、分析API
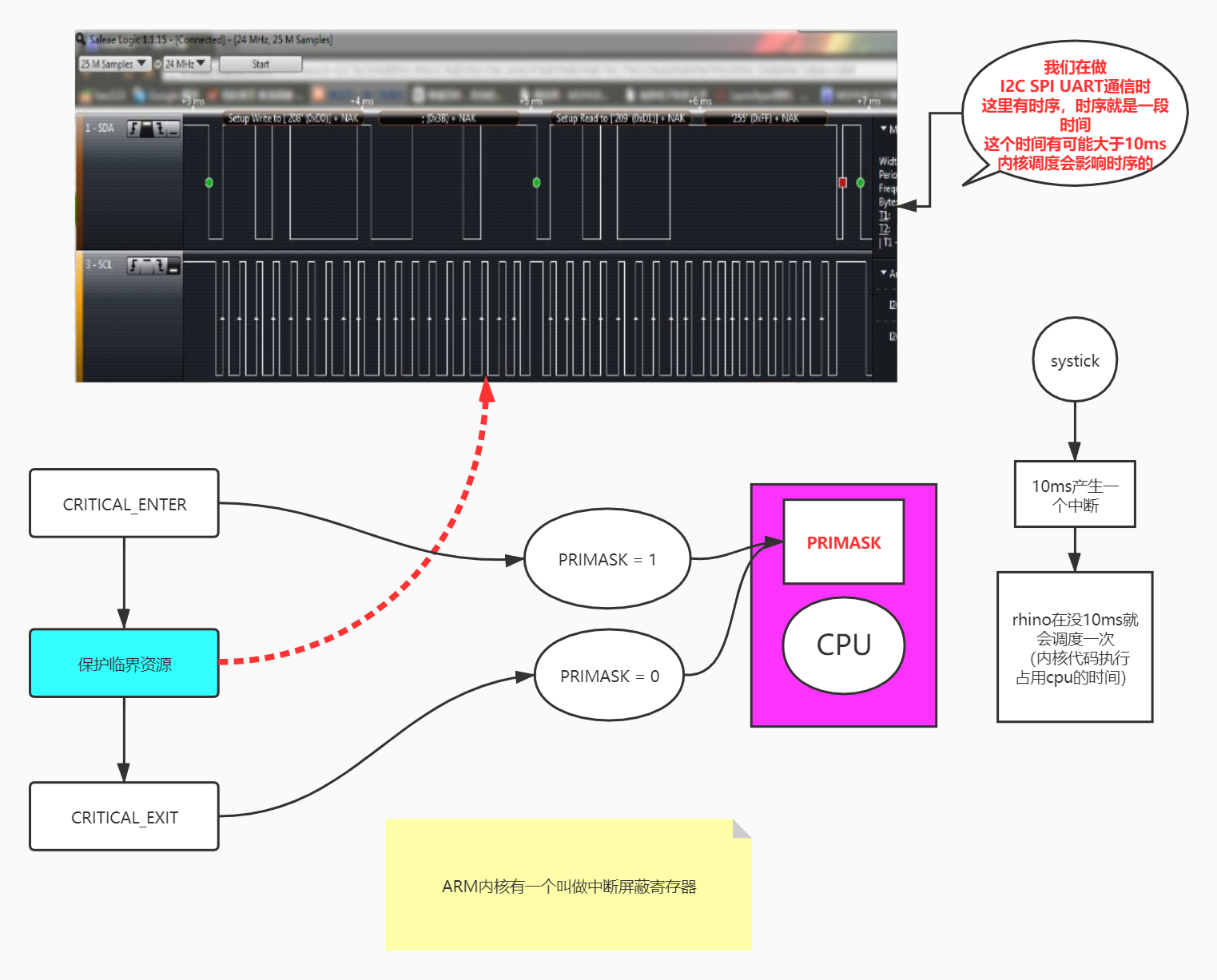
1. 基本原理
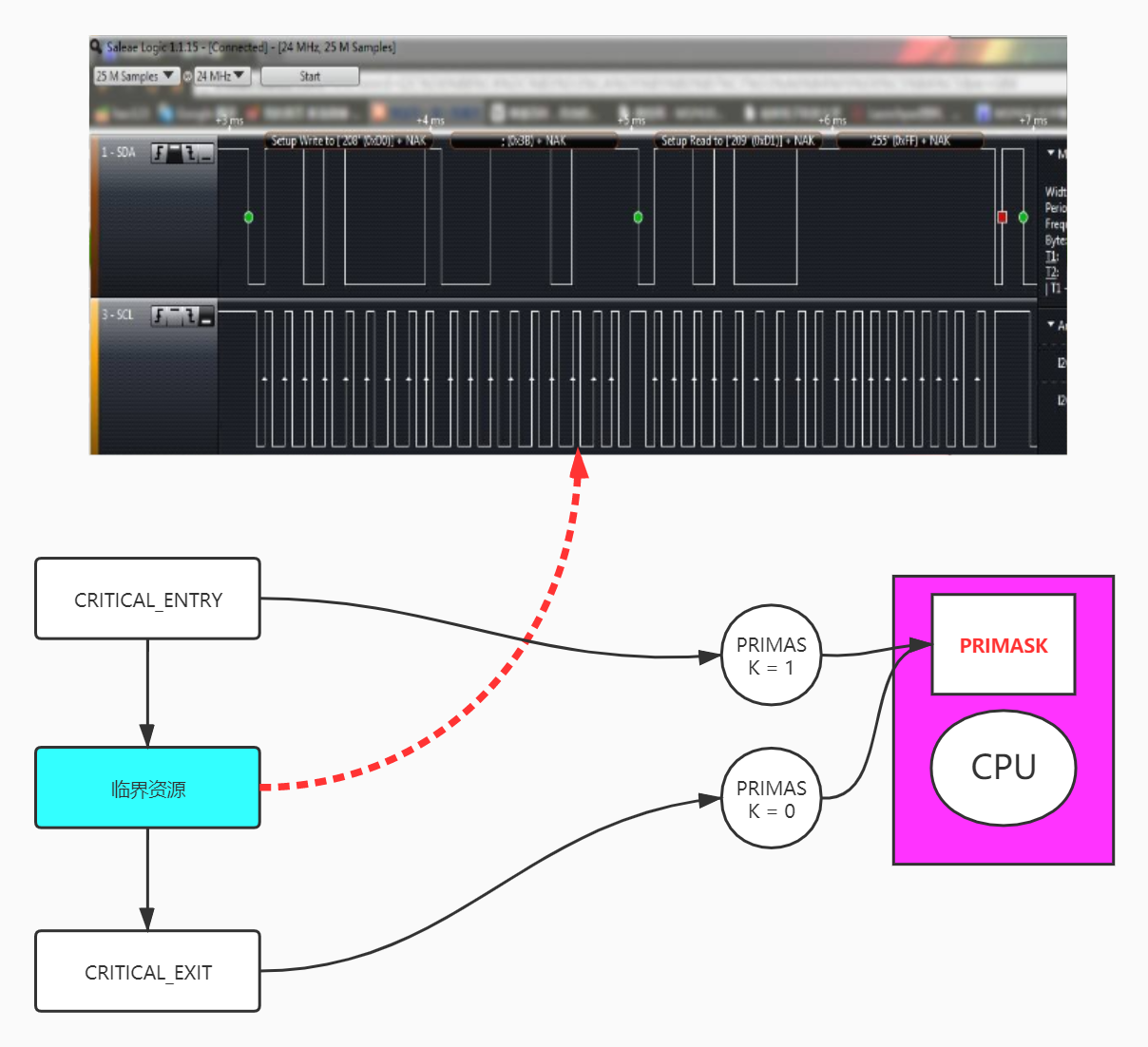
如上图,比如我们在使用I2C读取或者写入数据,某一个过程超过了任务调度的时间,此时为保证数据的正确性,我们不能让操作系统进行任务调度,这个时候我们就可以使用临界区,关闭所有中断,停止操作系统的任务调度:
2. API在哪?
临界区的API不是很好找,我这里以mk3080的arm架构为例,这几个API在AOS_SDK_PATH/platform/arch/arm/armv7m/include/port.h 中:
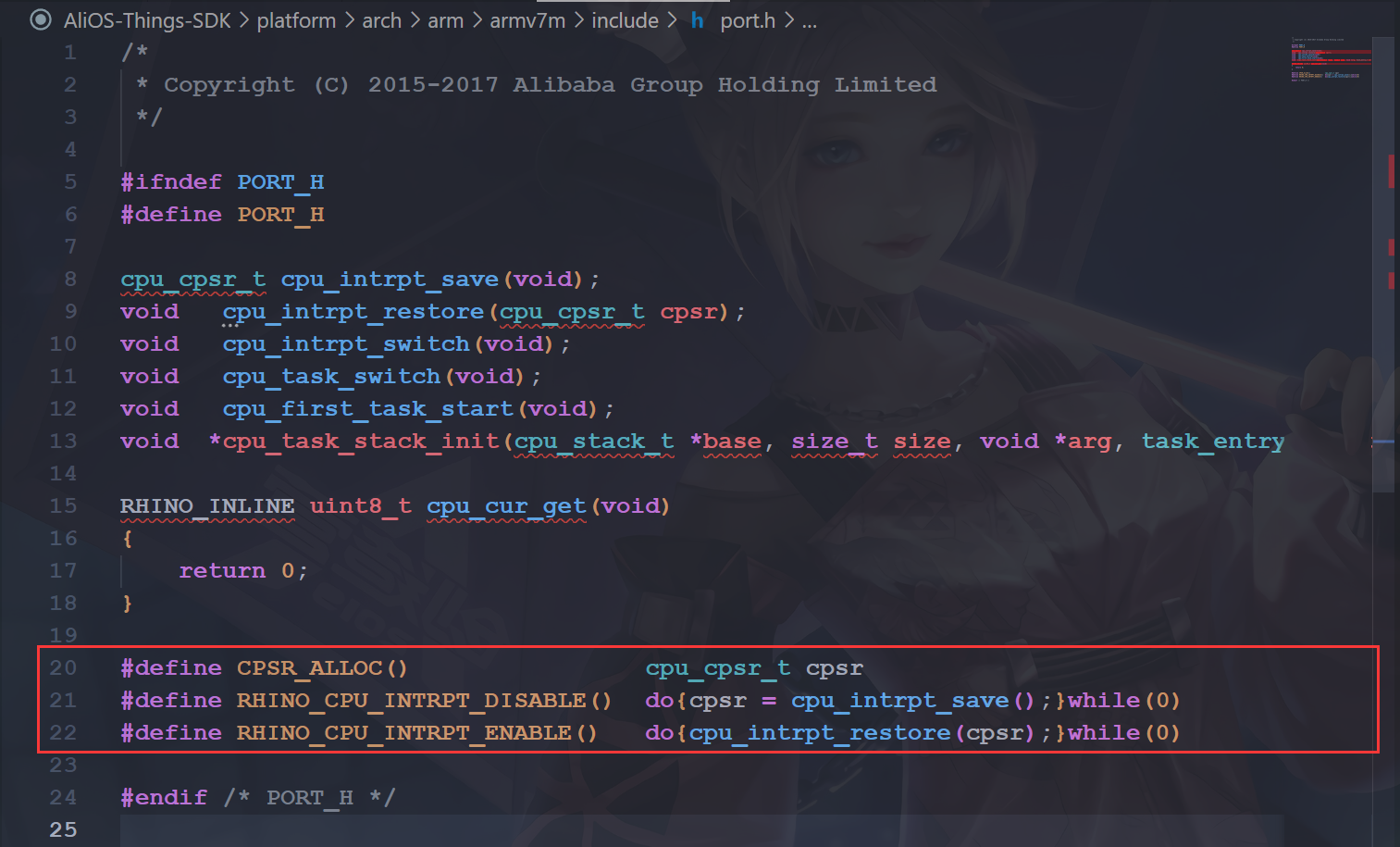
其中的 RHINO_CPU_INTRPT_DISABLE() 会关闭所有的中断。
3. 开关中断怎么实现的?
具体实怎么实现开关中断的呢?我们还是以mk3080使用的cortex-M4架构为例,我们打开AOS_SDK_PATH/platform/arch/arm/armv7m/gcc/m4/port_s.S,会看到有如下代码:
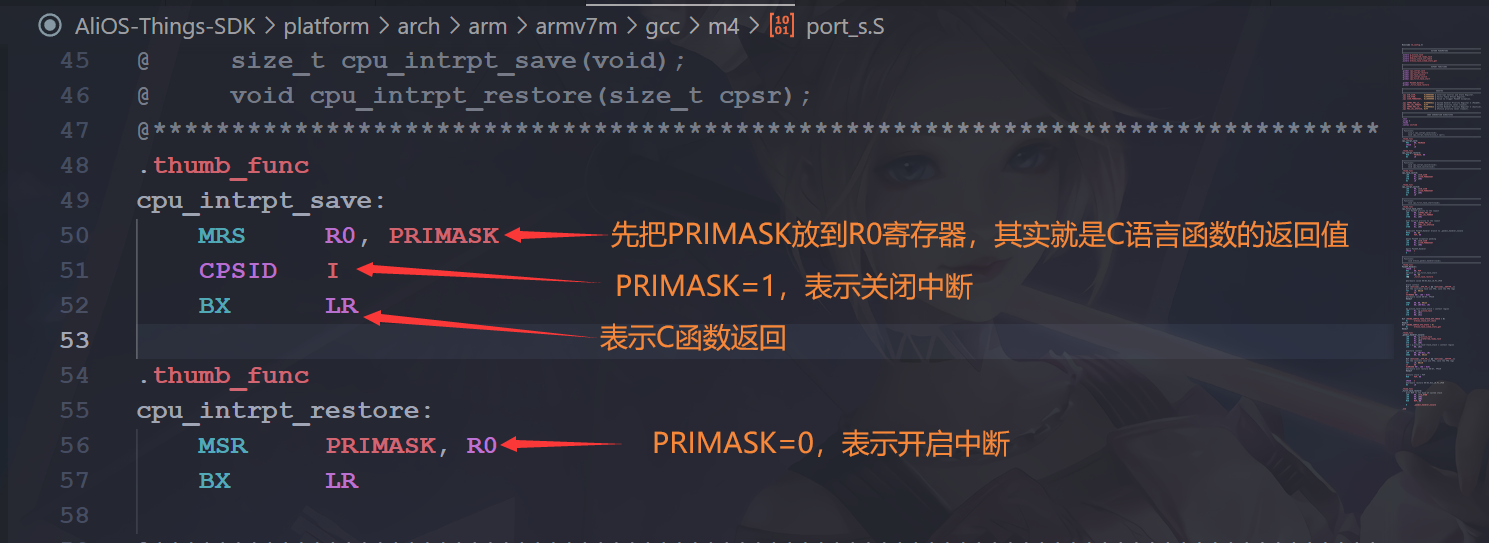
这就是前面的宏里面的具体内容啦,主要是通过汇编来关闭或者打开全局中断。
三、官方demo
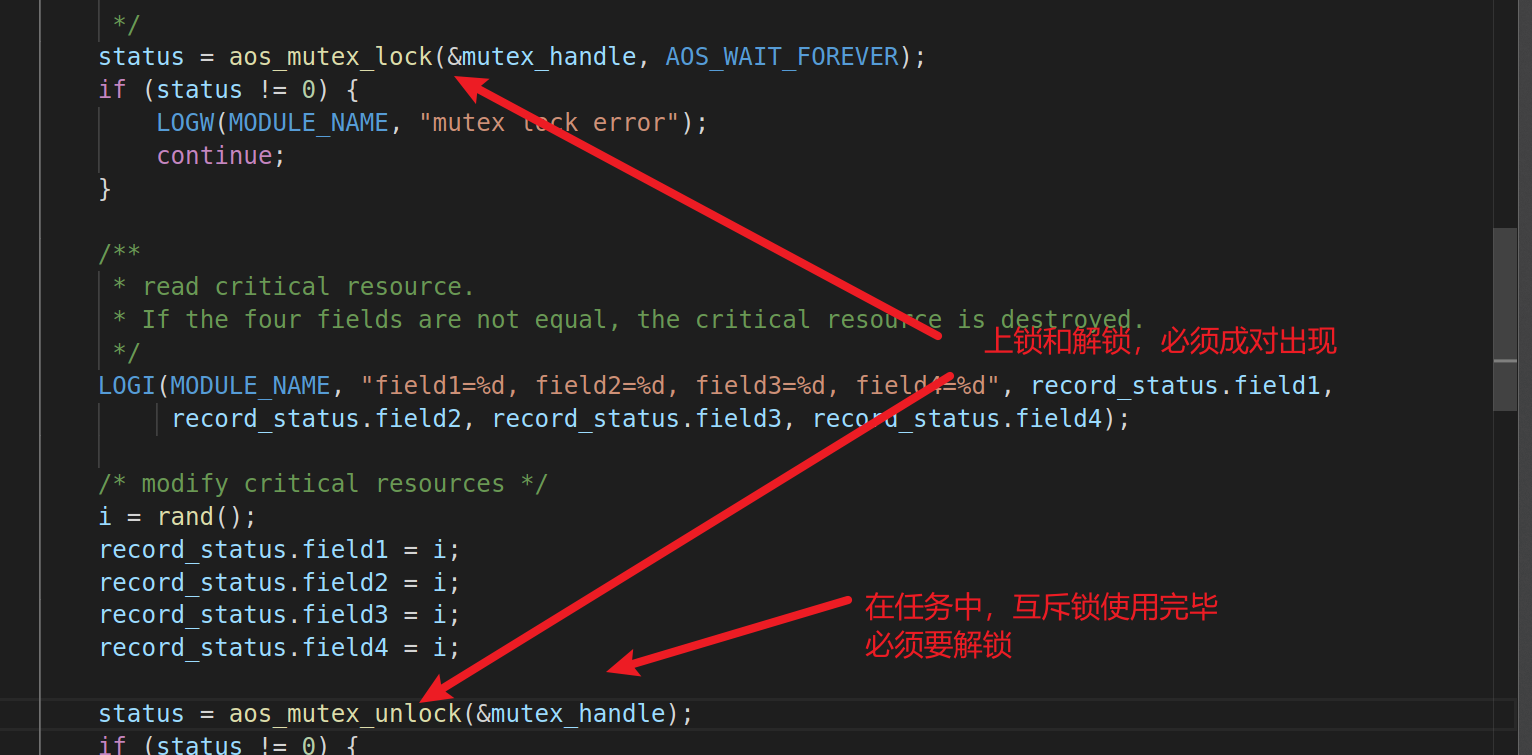
其实临界区是没有demo的,但是互斥锁中使用到了,就以此为例吧(其实前面学习互斥锁就见过了)我们先打开 AOS_ADK_PATH/application/example/kernel_demo/aos_api_demo/mutex_app.c:
找到这两个互斥锁函数,然后看一下这个获取互斥锁函数里面是什么,我们打开这个文件:AOS_ADK_PATH/core/osal/aos/rhino.c:
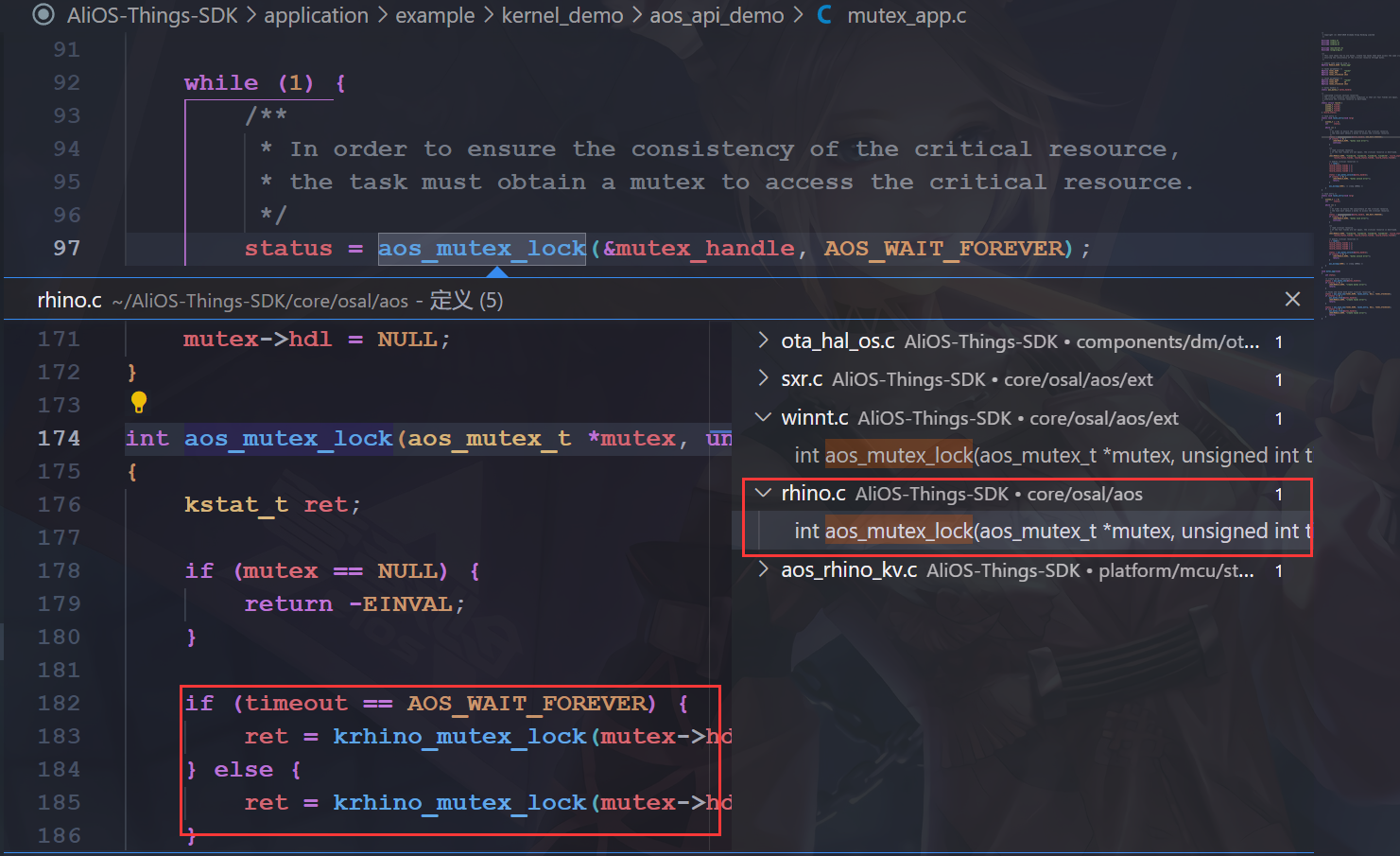
可以看到最终调用的是krhino_mutex_lock()这个函数,这个函数内部又是啥?我们打开这个文件AOS_ADK_PATH/core/rhino/k_mutex.c:
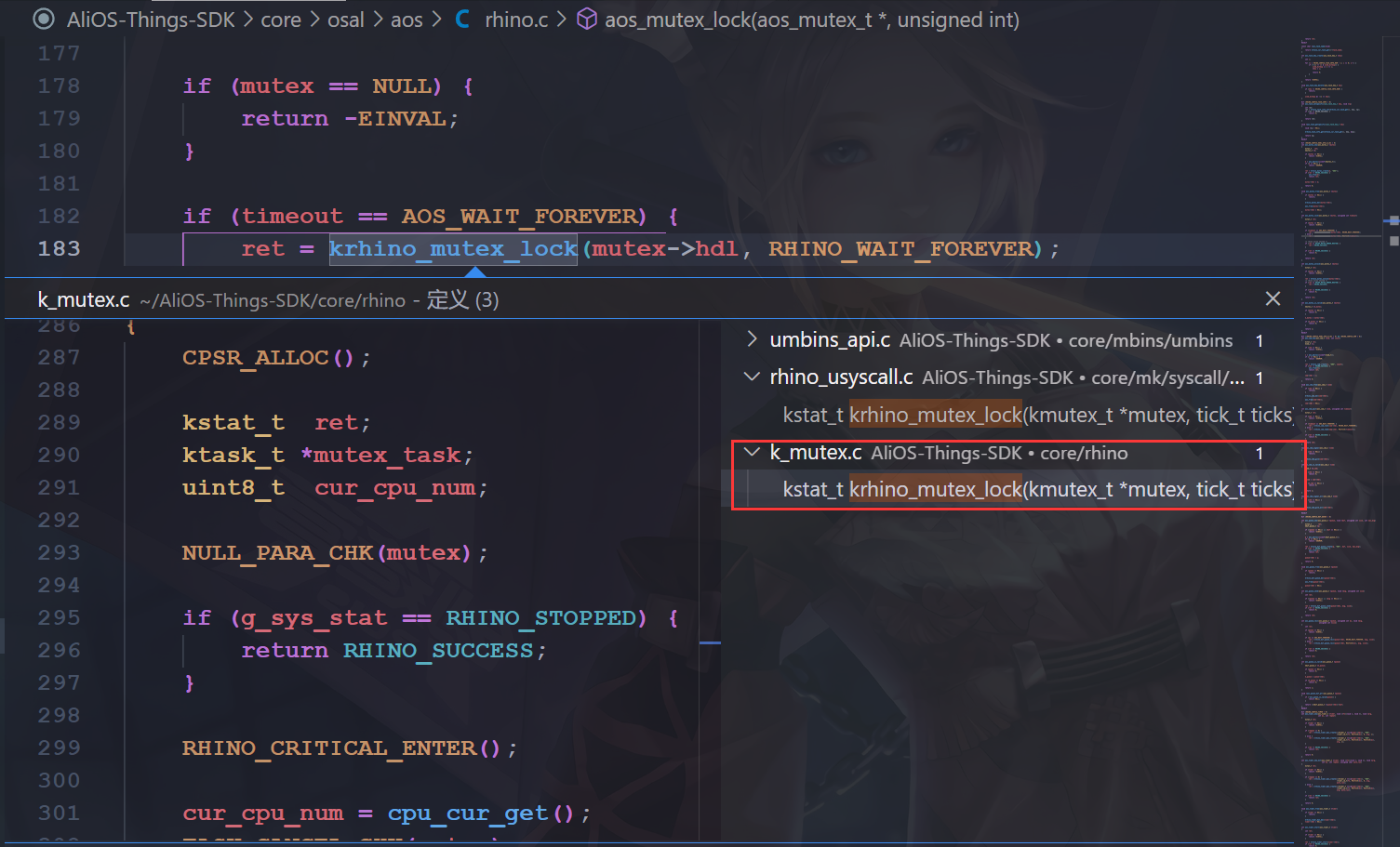
会看到这样一些内容:
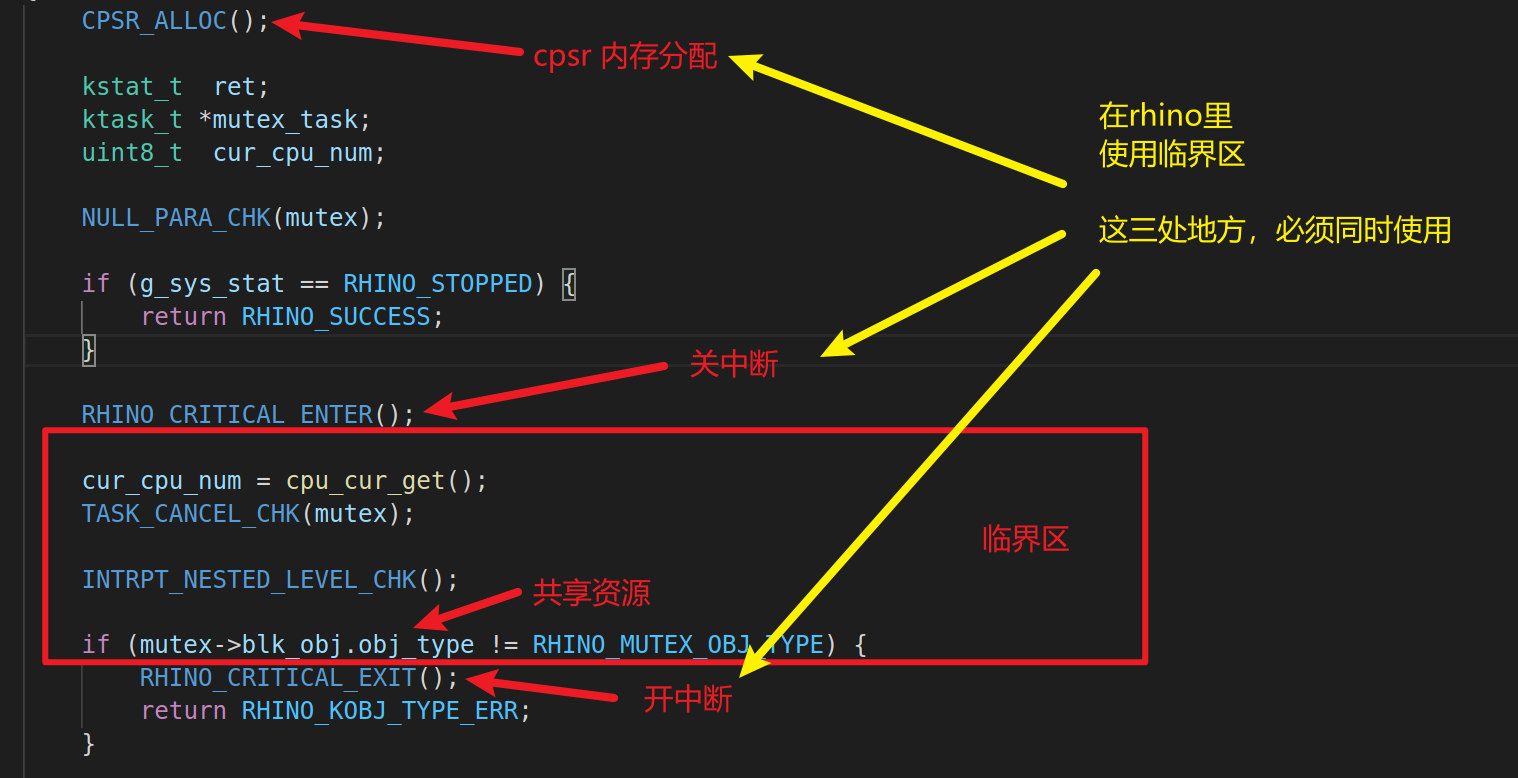
会看到这里的几个函数与上面API介绍的名字不太一样,但是实际原理是一样的,无非就是名字不同或者又封装了一次罢了。