LV17-01-输入类设备-05-触摸屏tslib开源库-01-简介与移植
本文主要是输入类设备控制——触摸屏tslib开源库的简介与移植的相关笔记,若笔记中有错误或者不合适的地方,欢迎批评指正😃。
点击查看使用工具及版本
| PC端开发环境 | Windows | Windows11 |
| Ubuntu | Ubuntu20.04.2的64位版本 | |
| VMware® Workstation 17 Pro | 17.6.0 build-24238078 | |
| 终端软件 | MobaXterm(Professional Edition v23.0 Build 5042 (license)) | |
| Win32DiskImager | Win32DiskImager v1.0 | |
| Linux开发板环境 | Linux开发板 | 正点原子 i.MX6ULL Linux 阿尔法开发板 |
| uboot | NXP官方提供的uboot,NXP提供的版本为uboot-imx-rel_imx_4.1.15_2.1.0_ga(使用的uboot版本为U-Boot 2016.03) | |
| linux内核 | linux-4.15(NXP官方提供) |
点击查看本文参考资料
| 分类 | 网址 | 说明 |
| 官方网站 | https://www.arm.com/ | ARM官方网站,在这里我们可以找到Cotex-Mx以及ARMVx的一些文档 |
| https://www.nxp.com.cn/ | NXP官方网站 | |
| https://www.nxpic.org.cn/ | NXP 官方社区 | |
| https://u-boot.readthedocs.io/en/latest/ | u-boot官网 | |
| https://www.kernel.org/ | linux内核官网 | |
| 其他网站 | kernel - Linux source code (v4.15) - Bootlin | linux内核源码在线查看 |
点击查看相关文件下载
| 分类 | 网址 | 说明 |
| NXP | https://github.com/nxp-imx | NXP imx开发资源GitHub组织,里边会有u-boot和linux内核的仓库 |
| https://elixir.bootlin.com/linux/latest/source | 在线阅读linux kernel源码 | |
| nxp-imx/linux-imx/releases/tag/rel_imx_4.1.15_2.1.0_ga | NXP linux内核仓库tags中的rel_imx_4.1.15_2.1.0_ga | |
| nxp-imx/uboot-imx/releases/tag/rel_imx_4.1.15_2.1.0_ga | NXP u-boot仓库tags中的rel_imx_4.1.15_2.1.0_ga | |
| I.MX6ULL | i.MX 6ULL Applications Processors for Industrial Products | I.MX6ULL 芯片手册(datasheet,可以在线查看) |
| i.MX 6ULL Applications ProcessorReference Manual | I.MX6ULL 参考手册(下载后才能查看,需要登录NXP官网) |
一、tslib 是什么
官网在这里:tslib,打开后就是上面的图片:
tslib 是专门为触摸屏设备所开发的 Linux 应用层函数库,并且是开源,也就意味着我们可以直接获取到
tslib 的源代码 。
tslib 为触摸屏驱动和应用层之间的适配层, 它把应用程序中读取触摸屏 struct input_event 类型数据(这是输入设备上报给应用层的原始数据)并进行解析的操作过程进行了封装,向使用者提供了封装好的 API 接口。
tslib 从触摸屏中获得原始的坐标数据, 并通过一系列的去噪、去抖、坐标变换等操作,来去除噪声并将
原始的触摸屏坐标转换为相应的屏幕坐标。
tslib 有一个配置文件 ts.conf, 该配置文件中提供了一些配置参数、用户可以对其进行修改 ,后面会详细进行学习。
tslib 可以作为 Qt 的触摸屏输入插件,为 Qt 提供触摸输入支持, 如果在嵌入式 Linux 硬件平台下开发过Qt 应用程序的话应该知道;当然,并不是只有 tslib 才能作为 Qt 的插件、为其提供触摸输入支持,还有很多插件都可以,只不过大部分都会选择使用 tslib。
二、tslib 移植
1. 下载源码
首先下载 tslib 源码包,进入到 tslib 的 git 仓库下载源码 :Releases · libts/tslib (github.com):
ALPHA 开发板出厂系统中已经移植了 tslib,并且版本为 1.16,可以在开发板执行 ts_finddev 命令查看到它的版本信息,如下所示:
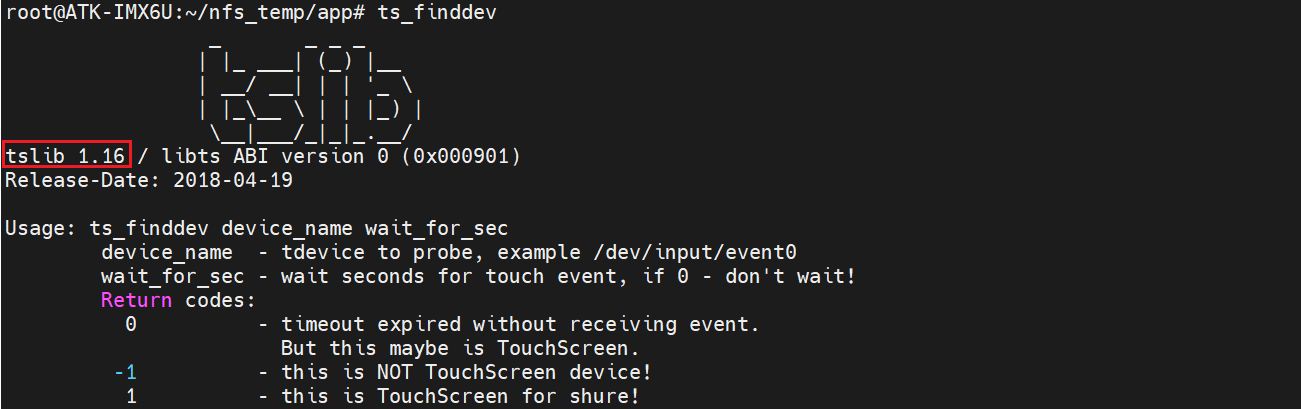
所以为了统一,我们也下载 1.16 版本的 tslib,往下翻找到 1.16 版本的下载链接:
我们点击 Release tslib 1.16 · libts/tslib (github.com) 进去:
下载 tar.bz2 或 tar.gz 格式压缩包,或者 tar.xz 压缩包,这里我下载 tar.gz 格式的压缩包文件,点
击文字即可下载。下载好后我们解压一下:

解压后有上图这些文件。
2. 编译源码
- (1)创建安装目录
我们创建一个out目录作为编译成果物存放的位置:
1 | cd ~/8linux_lib/tslib-1.16/ |

- (2)配置工程
1 | ./configure --host=arm-linux-gnueabihf --prefix=/home/sumu/8linux_lib/tslib-1.16/out |
至于工程是如何配置的,可以执行./configure –help 查看它的配置选项以及含义。
–host 选项用于指定交叉编译得到的库文件是运行在哪个平台,通常将–host 设置为交叉编译器名称的前缀,如 arm-linux-gnueabihf-gcc 前缀就是 arm-linux-gnueabihf;
–prefix 选项则用于指定库文件的安装路径,我们将安装路径设置为之前创建的/home/sumu/8linux_lib/tslib-1.16/out 目录。
配置完成后如下图所示:
- (3)编译工程
1 | make |
编译完毕之后如下图所示:
- (4)安装
1 | make install |
安装完毕之后如下所示:
这样out目录下就是我们的成果物了。
3. 移植到开发板
移植的最后一步就是把 tslib 安装目录下的库文件、 etc 下的配置文件以及编译得到的测试工具拷贝到开发板 Linux 系统目录下。
(1)将安装目录 bin/目录下的所有可执行文件拷贝到开发板/usr/bin 目录下
(2)将安装目录 etc/目录下的配置文件 ts.conf 拷贝到开发板/etc 目录下;
(3)将安装目录 lib/目录下的所有库文件拷贝到开发板/usr/lib 目录下
将安装目录下的测试工具、库文件以及配置文件拷贝到开发板之后,接着需要配置一些环境变量,因为
tslib 工作的时候它需要依赖于一些环境变量,例如它会通过读取环境变量来得知 ts.conf 配置文件、库文件
的路径以及我们要测试的触摸屏对应的设备节点等。
1 | TSLIB_CONSOLEDEVICE 用于配置控制台设备文件名,直接配置为 none 即可 |
如果想每次启动系统都能生效,可以把这些命令放置在/etc/profile 脚本中执行;出厂系统中已经配置好
了,无需进行配置。
三、编译输出目录简介
我们前面编译安装后,输出目录有以下文件:
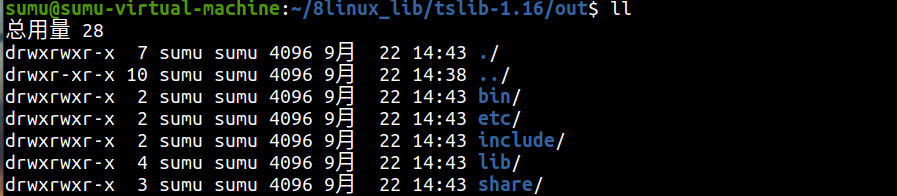
二级目录有以下文件:
1 | sumu@sumu-virtual-machine:~/8linux_lib/tslib-1.16/out$ tree -L 2 |
1. bin
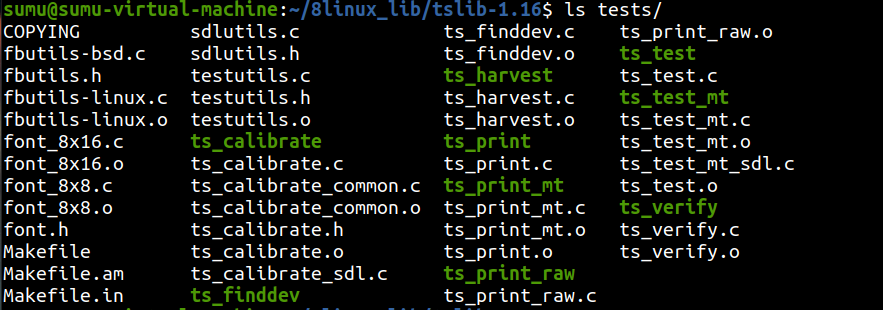
bin 目录下有一些 tslib 提供的小工具,可以用于测试触摸屏,如下所示:

这些测试工具的源码实现,可以在 tslib 源码中找到,具体路径为 tslib 源码目录下的 tests 文件夹中:
2. etc
etc 目录下有一个配置文件 ts.conf :

我们打开 ts.conf 文件看看它有哪些配置选项
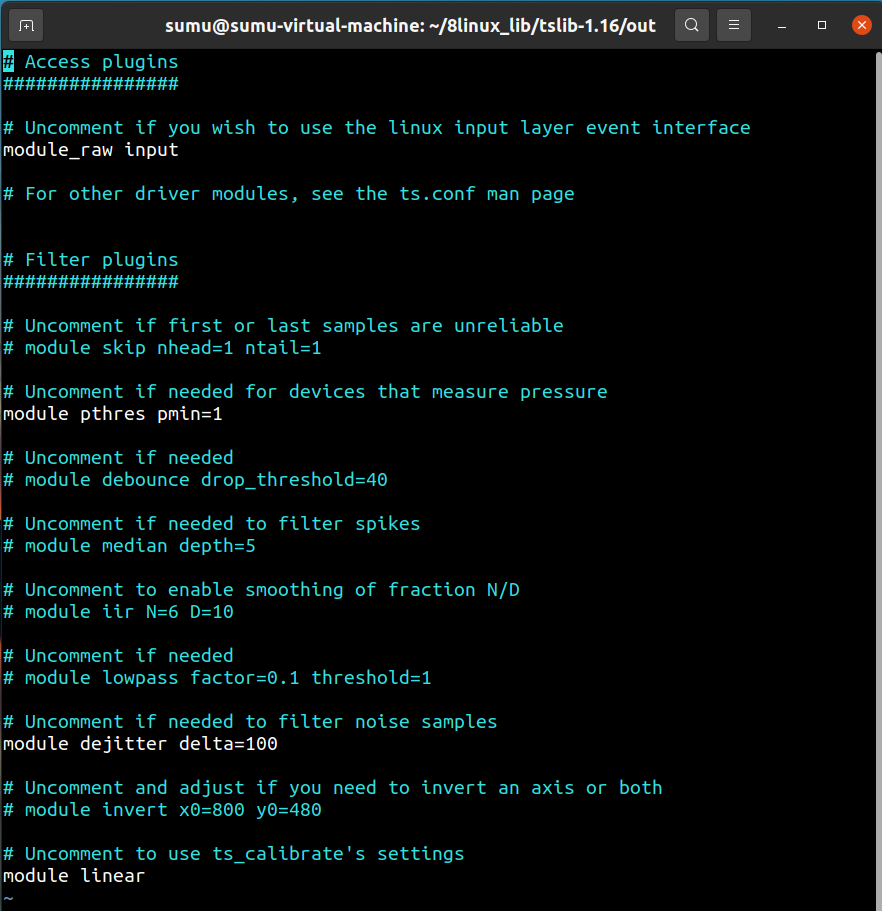
module_raw input:取消注释,使能支持 input 输入事件;
module pthres pmin=1:如果我们的设备支持按压力大小测试,那么可以把它的注释取消, pmin 用于调节按压力灵敏度,默认就是等于 1。
module dejitter delta=100: tslib 提供了触摸屏去噪算法插件,如果需要过滤噪声样本, 取消注释,默认参数 delta=100。
module linear: tslib 提供了触摸屏坐标变换的功能,如将 X、 Y 坐标互换、坐标旋转等之类,如果我们需要实现坐标变换,可以把注释去掉。
3. include
include 目录下只有一个头文件 tslib.h,该头文件中包含了一些结构体数据结构以及 API 接口的申明,
使用 tslib 提供的 API 就需要包含该头文件。

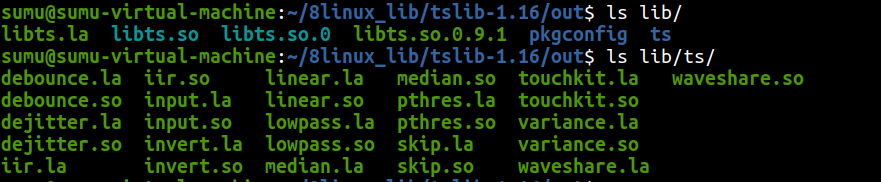
4. lib
lib 目录下包含了编译 tslib 源码所得到的库文件,默认这些都是动态库文件,也可以通过配置 tslib 工程
使其生成静态库文件。lib/ts 目录下存放的是一些插件库。
5. share

没去了解,可以忽略。
四、tslib 框架分析
tslib 的主要代码如图 :
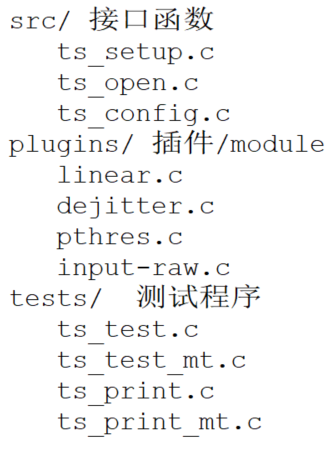
核心在于“plugins”目录里的“插件”,或称为“ module”。这个目录下的每个文件都是一个 module,每个 module 都提供 2 个函数: read、 read_mt,前者用于读取单点触摸屏的数据,后者用于读取多点触摸屏的数据。
要分析 tslib 的框架,先看看示例程序怎么使用,我们参考 ts_test.c 和ts_test_mt.c,前者用于一般触摸屏(比如电阻屏、单点电容屏),后者用于多点触摸屏。
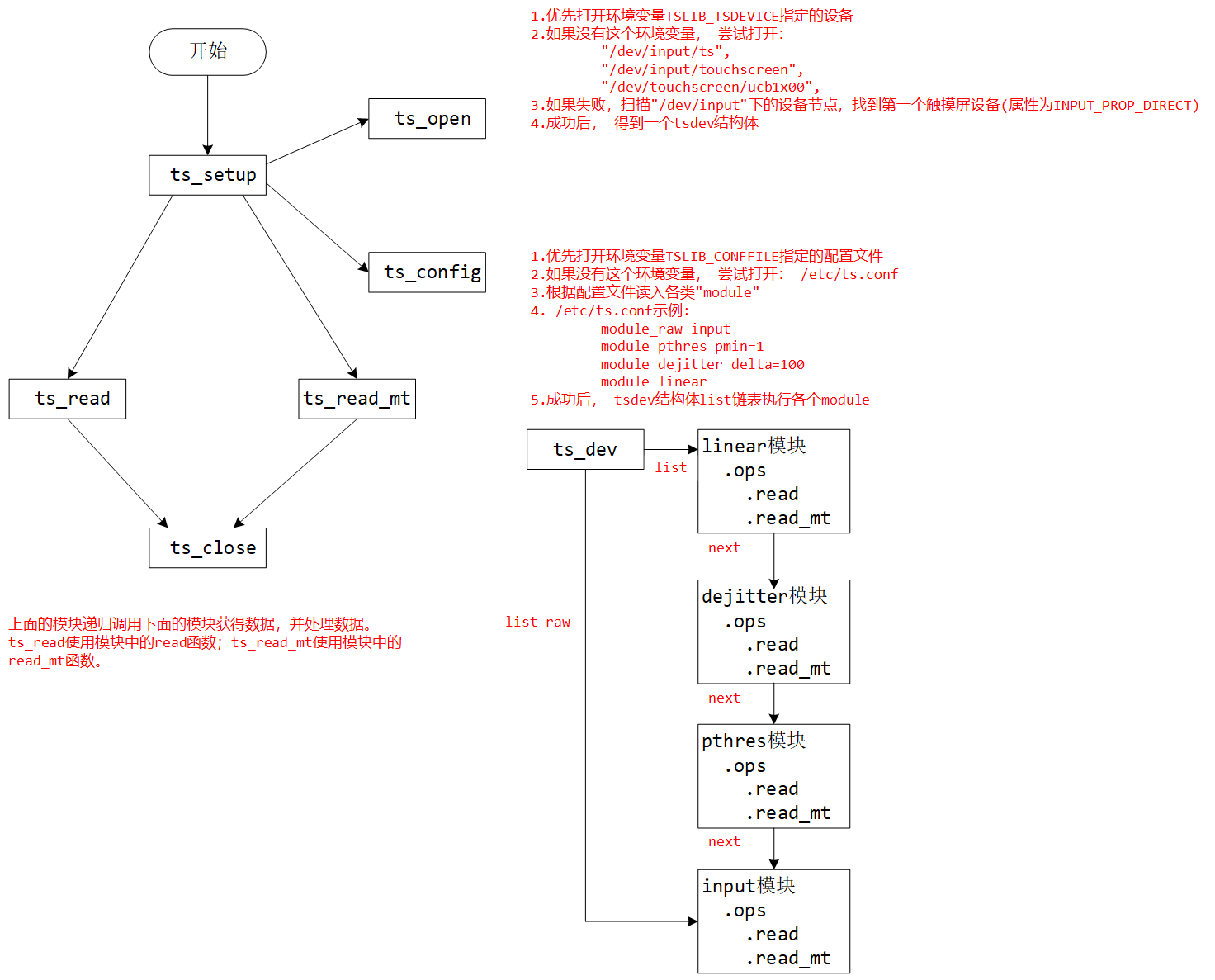
调用 ts_open 后,可以打开某个设备节点,构造出一个 tsdev 结构体。然后调用 ts_config 读取配置文件的处理,假设/etc/ts.conf 内容如下:
1 | module_raw input |
每行表示一个“ module”或“ moduel_raw”。对于所有的“module”,都会插入 tsdev.list 链表头,也就是 tsdev.list执行配置文件中最后一个“ module”,配置文件中第一个“ module”位于链表的尾部。
对于所有的“ module_raw”,都会插入 tsdev.list_raw 链表头,一般只有一个“ module_raw”。
注意: tsdev.list 中最后一个“ module”会指向 ts_dev.list_raw 的头部。无论是调用 ts_read 还是 ts_read_mt,都是通过 tsdev.list 中的模块来处理数据的。这写模块是递归调用的,比如 linear 模块的 read 函数如图 :

linear 模块的 read_raw 函数如图 :

因为是递归调用,所有最先使用 input 模块读取设备节点得到原始数据,再依次经过 pthres 模块、 dejitter 模块、 linear 模块处理后,才返回最终数据。